


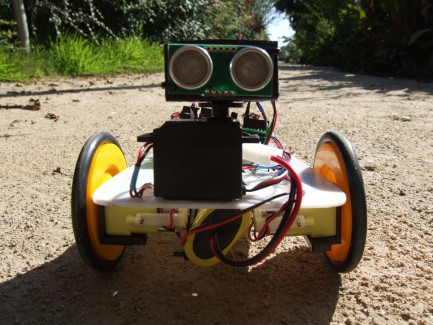
Farrusco - my second robot
This is my second robot!
With a better understanding of robot building and navigaton programming i´ve came up with this robot!
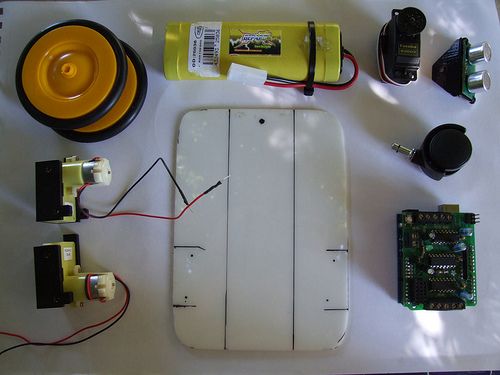
I think that the great improvement here was to make a plan of what i want to build, and started to find solutions before the assemble proccess. So this came out a more successfull robot!!
It´s my first real approach of avoiding obstacles and navigation programming and i´ve had a lot fun! Yet, the values that returns from the sensor fluctuate a little and i must work on it!
oh! and a BIG thanks to letsmakerobots.com :D
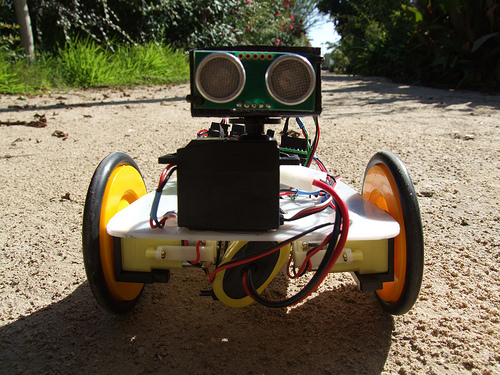
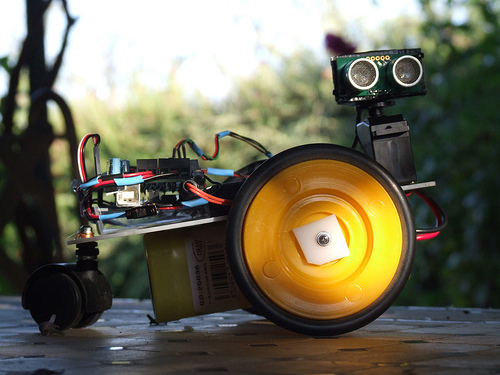
avoid obstacles
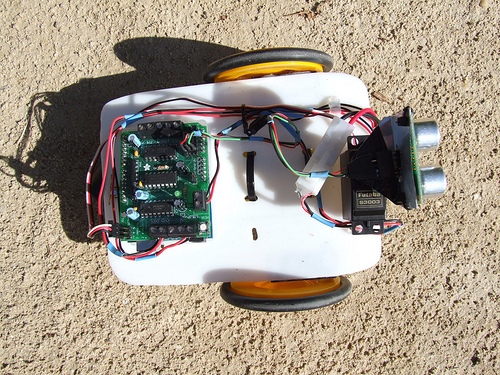
- CPU: Arduino diecimila
- Sensors / input devices: SRF005
- Target environment: indorr and outdoor