This is my second version of my ERV-1 robot.
Update : 27-2-2012
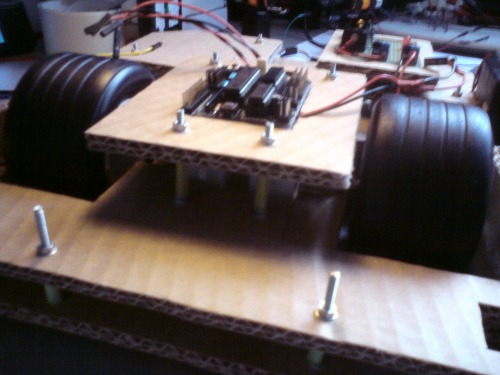
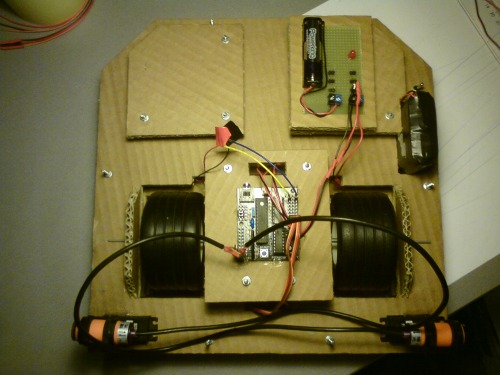
Picaxe 28x1 Project-board mounted above the motors.
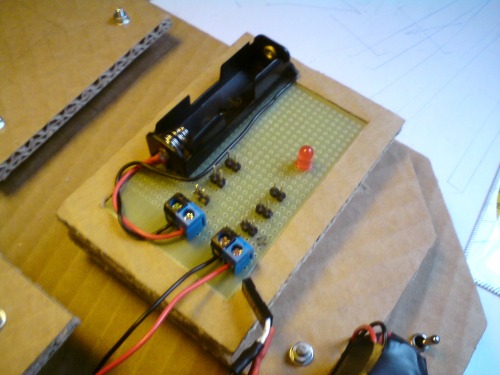
Home-made Power supply board, with one row for 1,5 volts and one row for 4,5 volts.
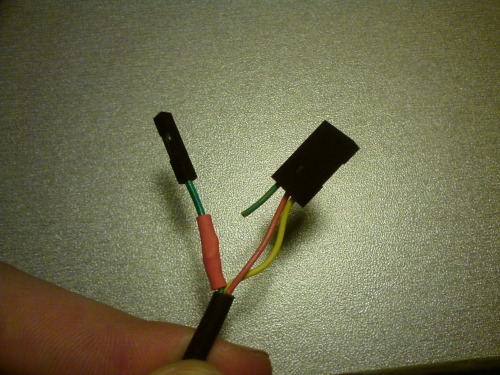
Modified cable for the IR-sensors.

The changes are:
Compact design, a few improvements and the battery standing for more room for other parts.
With integrated speaker.
- Actuators / output devices: 2 servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4.5V
- Sensors / input devices: 2 IR-sensors
- Target environment: indoor, flat surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/erv-2
Nice! But I have a
Nice! But I have a suggestion: the battery is weight, having it on one side will make the robot slowly veer to that side. It is better to center the battery, actually the center of weight should be in the center of the robot. However, if you know that your motors do not rotate at the same speed, you can place the battery on the side that has the fastest motor to slow it down, perhaps will be enough to compensate the difference. Also, the speaker has some weight too, did you mount it the oposite side of the battery? That may be enough to center the weight…
Weight,
The speaker is on the oposite side from the battery.
And also the battery and the speaker are not heavy.

