



ERV-2
This is my second version of my ERV-1 robot.
Update : 27-2-2012
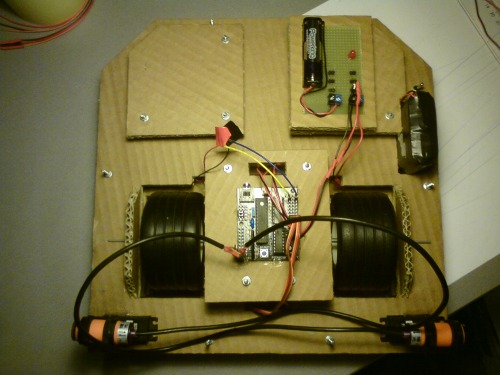
Picaxe 28x1 Project-board mounted above the motors.
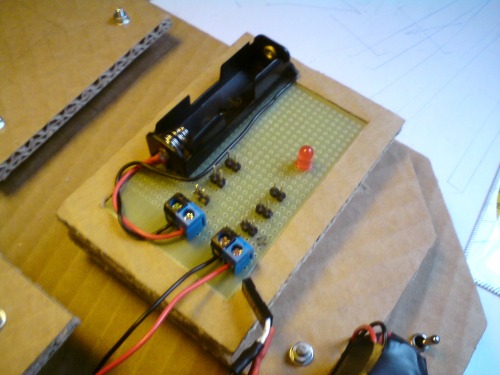
Home-made Power supply board, with one row for 1,5 volts and one row for 4,5 volts.
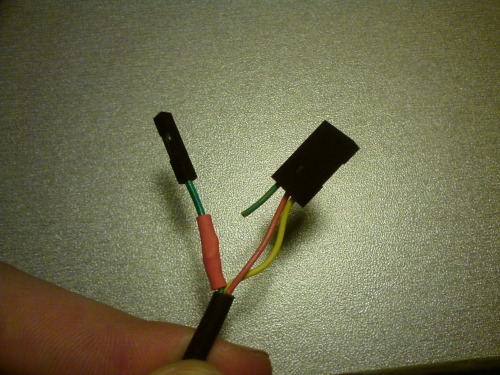
Modified cable for the IR-sensors.

The changes are:
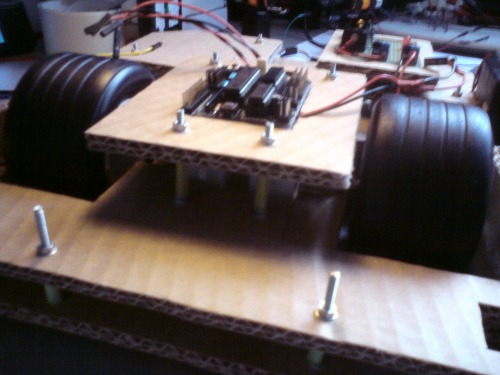
Compact design, a few improvements and the battery standing for more room for other parts.
With integrated speaker.
- Actuators / output devices: 2 servos
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4.5V
- Sensors / input devices: 2 IR-sensors
- Target environment: indoor, flat surfaces