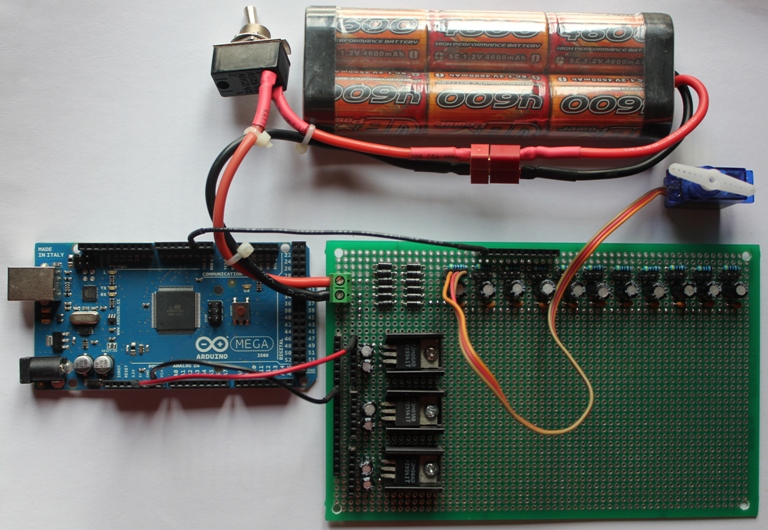
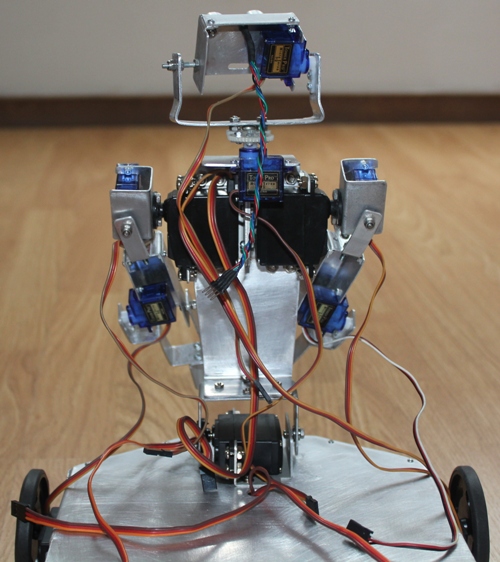
Elektro's brain under construction. The main power supply is in the moment a 7.2 V/4600 mAh NiMh battery. I have soldered Li-Po-battery connectors to the battery and main ON/OFF switch, so can change easily to a Li-Po-battery later.
A couple of diodes are used to drop the voltage to approx. 6 V for the servos. 3 low drop voltage regulators (LP 2954) power the main brain (in the moment an Arduino Mega 2560), sensors, amplifiers etc.
rmp3 is still not working with the Arduino Mega 2560, I have to figure out later.
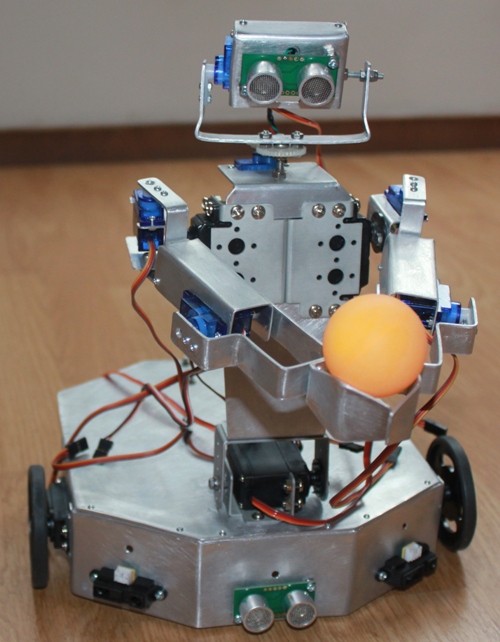
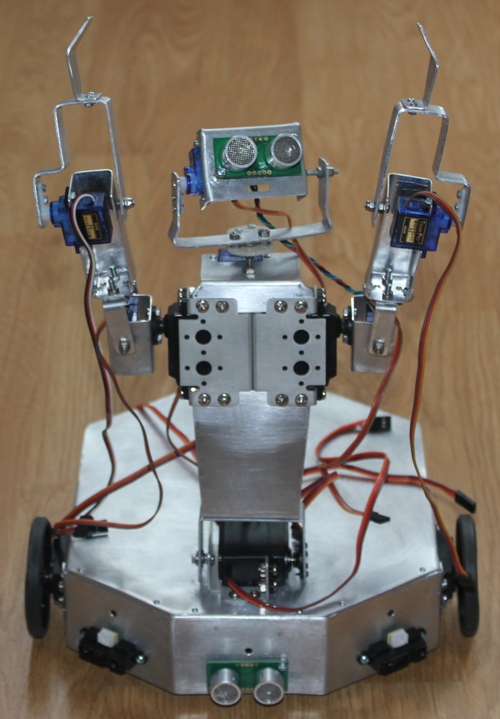
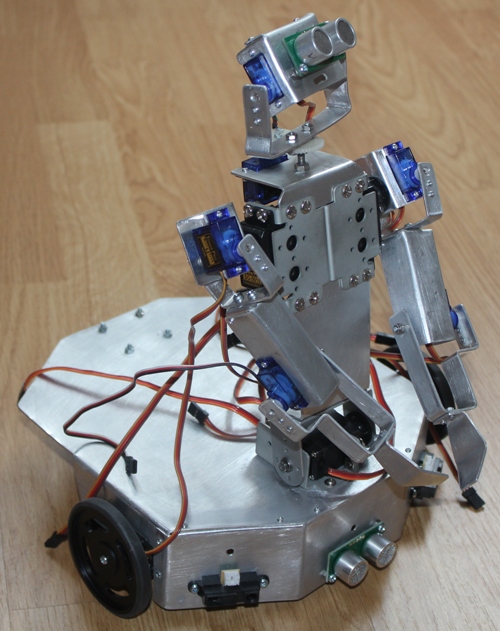
This is my newest robot project: Elektro. I named him like this as a homage on Elektro; a robot built by the Westinghouse Electric Corporation in its Mansfield, Ohio facility between 1937 and 1938. As his predecessor, Elektro is made from aluminium sheet. I have used aluminium sheet with a thickness of 1 and 1.5 mm and some simple tools like tinsnips, a cordless Dremel and drill, a file, sanding paper and two squared timbers and clamps to bent the aluminium sheet.
Elektro's tasks are in the moment
Speech (MP3-player)
Speech recognition
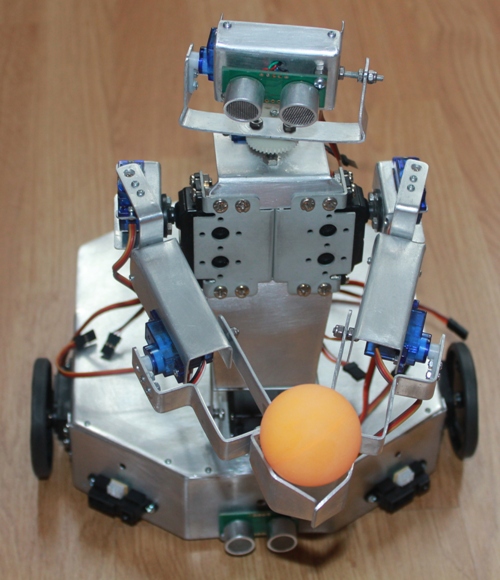
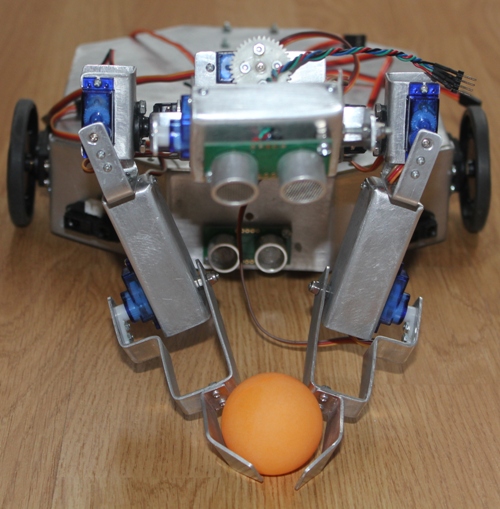
Grasping simple objects
Playing with objects
Expressing feelings like joy and anger
Following people
Learning
So far his mechanical construction is done, shown in pictures below. Next step will be to build all the electronic sub-systems.
I hope you like it. I'll update this page as I make progress.
Interacts with human beings
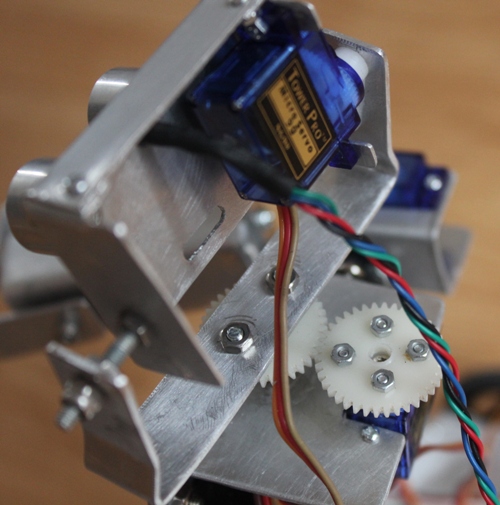
Actuators / output devices: loudspeaker, LCD, 2 x Tower Pro MG 995 (continuous rotation), 1 x Tower Pro MG 995 (hip), 6 x Tower Pro 9g (arms and head), 2 x Tower Pro SG-5010 (shoulder)
Control method: autonomous
CPU: Max32, 80 Mhz, 32 bit
Power source: 7.2 V 3300 mAh Li-Po
Programming language: C
Sensors / input devices: pressure sensor, accelerometer, 2 x SRF05, 2 x Sharp IR, 2 x microphone
Wow you have really packed a lot of potential functionality into this robot and its simply beautiful as well. Good luck with your project, I am looking forward to the future updates.
Oh, this is awesome. I hope you will get the electronics and the programming done soom to show us the final result. How about the learning??? Do you plan to use a kind of neuronal network or/and just an algorithm to drop wrong or bad choices and kep the good ones?
Oh, it’s a way above my horizon…higher math but I am sure it’s exactly your theme. Good luck and please keep us posted about the progress…When we meet next time (soon) I want to hear about it
Good to see an update. The big board is for the servos and other things? Do you plan to integrate the Arduino Mega into that board or will you keep them separated?
Could you bring it at Monday to show us? (i mean the whole Elektro:-) )
Yep, the perf board is for the servo drivers, power supply, sensors and sensor electronics. The Arduino will be mounted above this perf board with spacers.
So far I know, IDE 1.0 is not working on rmp3. With the 023 version I can at least compile the program without error message, but it still saying anything.
I’ll bring Elektro to Hackerspace after he’s able to do some tasks. OK?
Wow! How come I’ve missed it? It looks so much as my MiniEric robot! Nicely done! Can’t wait for more action! I am waiting for my 3D printer to arrive to make new parts for mine so I can upgrade it, change a few broken servos and fix the servo jerks at startup. Then again, programming the mapping stuff, arrrgh!