



Elektro
***Update 05/05/2012***
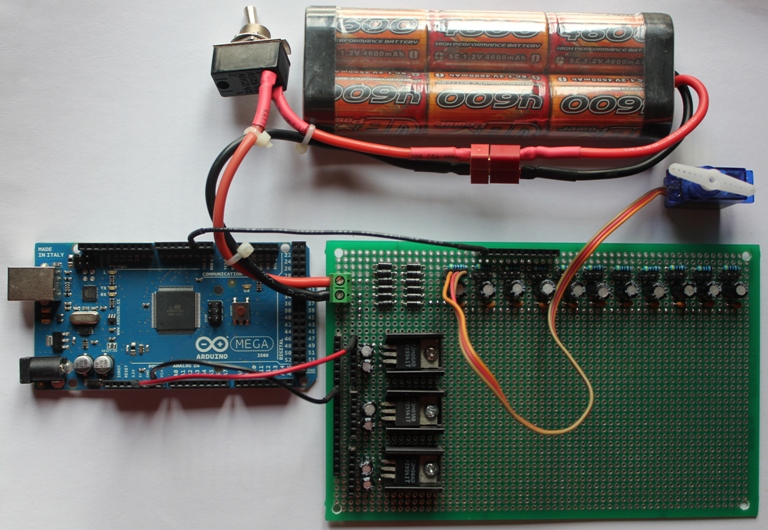
Elektro's brain under construction. The main power supply is in the moment a 7.2 V/4600 mAh NiMh battery. I have soldered Li-Po-battery connectors to the battery and main ON/OFF switch, so can change easily to a Li-Po-battery later.
A couple of diodes are used to drop the voltage to approx. 6 V for the servos. 3 low drop voltage regulators (LP 2954) power the main brain (in the moment an Arduino Mega 2560), sensors, amplifiers etc.
rmp3 is still not working with the Arduino Mega 2560, I have to figure out later.
----------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
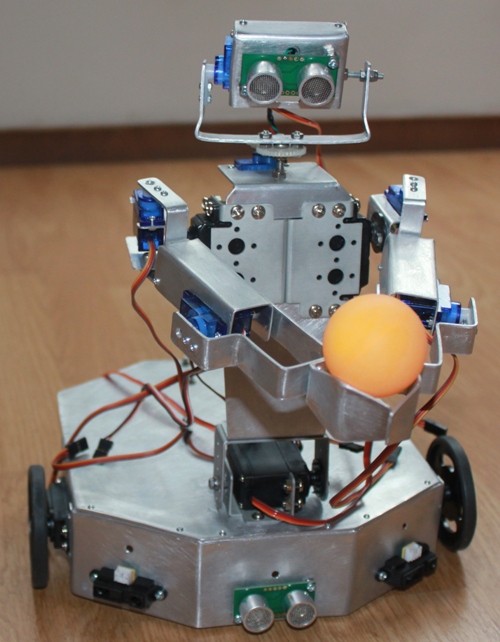
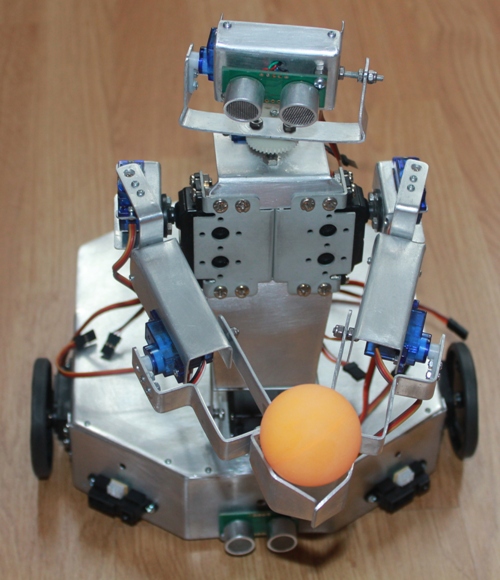
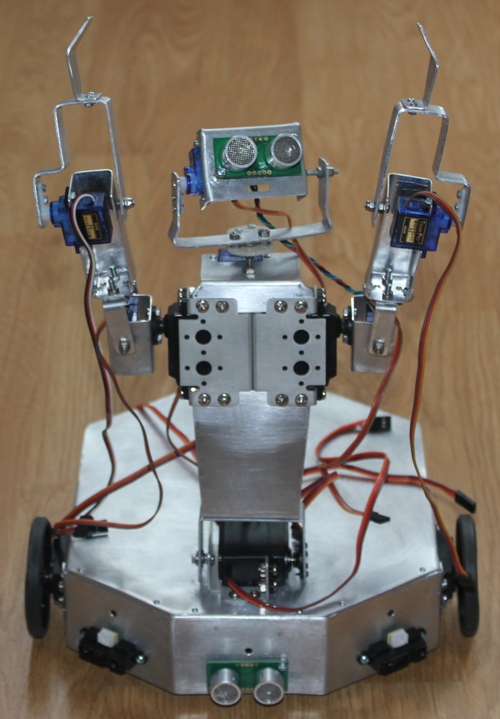
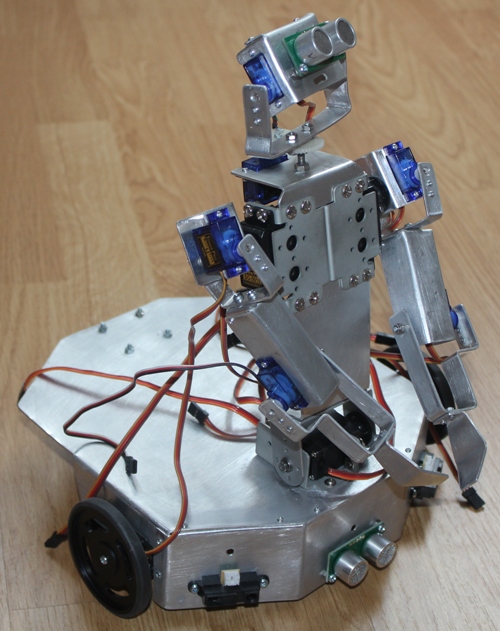
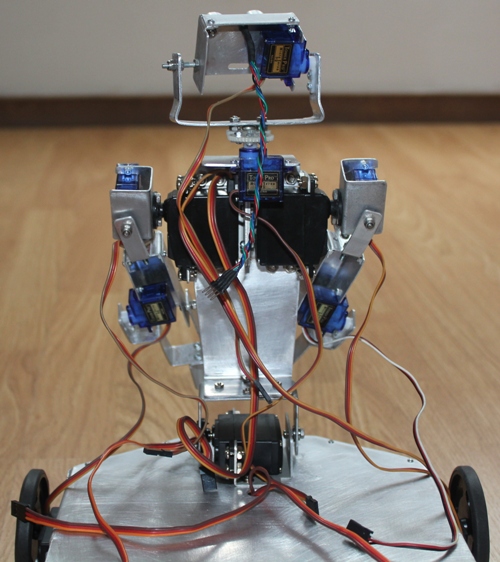
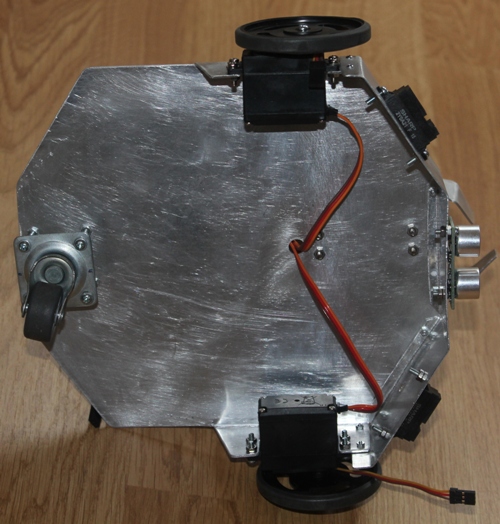
This is my newest robot project: Elektro. I named him like this as a homage on Elektro; a robot built by the Westinghouse Electric Corporation in its Mansfield, Ohio facility between 1937 and 1938. As his predecessor, Elektro is made from aluminium sheet. I have used aluminium sheet with a thickness of 1 and 1.5 mm and some simple tools like tinsnips, a cordless Dremel and drill, a file, sanding paper and two squared timbers and clamps to bent the aluminium sheet.
Elektro's tasks are in the moment
- Speech (MP3-player)
- Speech recognition
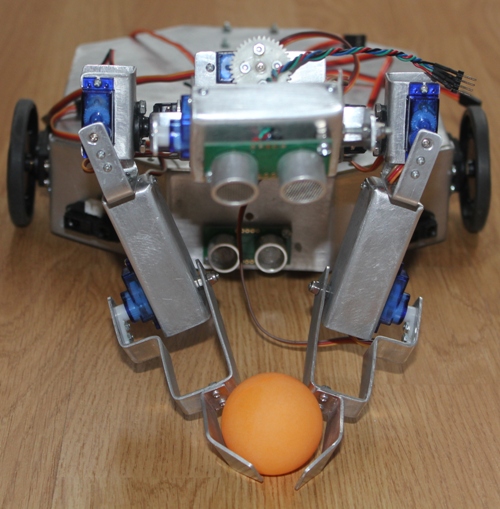
- Grasping simple objects
- Playing with objects
- Expressing feelings like joy and anger
- Following people
- Learning
So far his mechanical construction is done, shown in pictures below. Next step will be to build all the electronic sub-systems.
I hope you like it. I'll update this page as I make progress.
Interacts with human beings
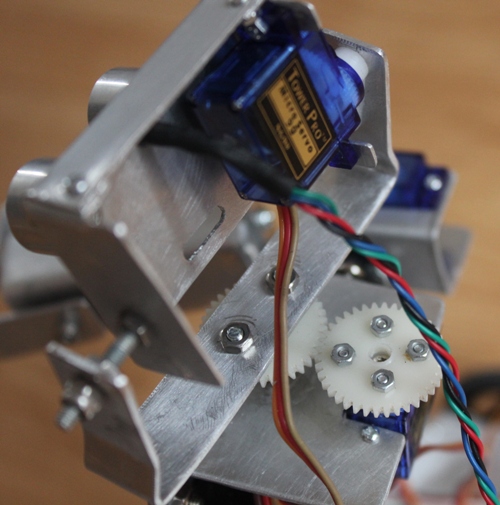
- Actuators / output devices: loudspeaker, LCD, 2 x Tower Pro MG 995 (continuous rotation), 1 x Tower Pro MG 995 (hip), 6 x Tower Pro 9g (arms and head), 2 x Tower Pro SG-5010 (shoulder)
- Control method: autonomous
- CPU: Max32, 80 Mhz, 32 bit
- Power source: 7.2 V 3300 mAh Li-Po
- Programming language: C
- Sensors / input devices: pressure sensor, accelerometer, 2 x SRF05, 2 x Sharp IR, 2 x microphone
- Target environment: indoor on smooth surfaces