"...higher than many houses, striding over the young pine trees, and smashing them aside in its career; a walking engine of glittering metal, striding now across the heather; articulate ropes of steel dangling from it, and the clattering tumult of its passage mingling with the riot of the thunder."
-- The War of the Worlds by H.G. Wells (1898)
Allways liked those Invading Tripods coming from space bringing chaos and destruction upon earth and mankind.
So want to build a Tripod, it's probaly not going to be the invading, man destroying kind like in The War of the Worlds, but that's definetly my source of inspiration.
At the moment 12 June 2008 I'm laying sick but skecthing how I think the first working model of the Tripod should be, as soon as I get better and get back to my own place I'll upload my sketches and come with some more details.
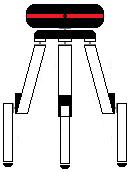
Did a quick paint drawing of what I hope to end up with in the end or it should be something like that.
Lego Prototyping
So had to finde out how to build a Tripod which has a good chance of walking, so at the PROSA Robotics meetup on June 18th I build a prototype of how the legs should be positioned and work and thx to the input and help to move around the lego prototype from JKA and Thomas Å, I now have a couple of ideas on how this Tripod could move around.
Tripod Movement
Have been doing some research/studying of tripod movement, from different movies and animations, and think I have figured out a way to move, working on some sketches of how it should work, will post them as soon as they are finishe, also started to finde materials to build E.I.T v.1 with.
Oh yeah, they’re the most lovable machines ever built! Until they’re standing over your house!
If you make it big enough you can have 2 functions per leg: 1 servo controlling overall movement and 1 controlling the movement of the 2nd half to act as a knee. I don’t think you’ll get the fluid movement seen in the movie or described in your book on the first try, but this will undoubtably be a fun robot!
Brennon
“Our deepest fear is not that we are inadequate. Our deepest fear is that we are powerful beyond measure. It is our light, not our darkness that most frightens us… -Marianne Williamson
Yea movie like moving Tripods not plausible Two servos per leg will definetly be the way to go I think, or else it won’t be a real Tripod I think, but yea the fluid motion like in the newer movie would be way out of my league and well the Tripods from the good old movie (my favorite) which uses some kinda electromagnecticfield based legs is definetly totally for the more gifted people to make
Will it do anything besides not bump into objects? You might want to equip it with a standard laser pointer in honor of the book and movie. Just an idea.
Brennon
“Our deepest fear is not that we are inadequate. Our deepest fear is that we are powerful beyond measure. It is our light, not our darkness that most frightens us… -Marianne Williamson
Well my first goal will be to make it walk, when that’s done then a lot more fun can begin, but definetly could be cool to add some laser pointers to it or maybe some simple arms or something.
just hanging from both sides of the head and down with laser pointers, but first things first, something that resemples a Tripod and can walk that’s the first goal.
After having messed about with a biped, I realised I should have started with a hexapod!
Having said that, I really want this to work for you. So I will point out that to a certain extent, taller is better. If it’s short, the legs will need to be FAST. Each will need to get up, move and get down again before the bot falls too far. The taller it is, the longer it takes to start to fall, so the slower the legs can be.
If we assume that the leg which is about to leave the ground is “number 1,” I presume you’re going to do something clever like shifting the centre of balance over number 2 and 3 before number 1 leaves the ground?
I agree. The huge problem I agree. The huge problem with a tri is shifting weight so it doesnt fall over when it is only on two legs. Start off with a few more legs and it will be easier. When it works take off a leg and get it working…
LOL! Yeah, that may just be a good aproach; Start with 8 legs. and then take off one leg at a time :D:D:D
Zalz; Anything less than 6 legs that is walking is hard, because you will need to balance. This is why hexa’s are popular; You can rest on 3 legs, move 3…
I would like to see how fast it could go since part of its gate is falling - it would be very exciting to watch.
I did not read the whole article but one thing I did notice offhand was - it appears that the robot has controller wires across the joints. If that is the case this robot can’t do more than 2 or 3 strides in the same direction before it pulls out the control wires - it would need a slip ring on the joints (which are typically a pain in the ■■■■) - unless part of the gate unravels the wires of the falling leg - regardless - its great ! I’d like to see it move more than 1 step without the CG.
Just goes to show you can move around in clever ways with 3 legs - maybe put blades on them and have it spin - transform itself into a helicopter
So what if it’s not easy, easy thing ain’t fun, I know I should do something more easy to start with but well got the idea and well laying sick and started playing with the idea and just can’t let go of it.
One has to start somewhere and what then if the thing you start with is not easy, well then maybe it just takes more time and maybe you learn more, but is that wrong, I don’t think so.
And well things are only as hard as you make them, and I love a bloody challenge, and people should never tell what I can and can not do because well I hate that, but then againg it just makes it an even more interesting challenge.
Don’t remember saying or writing that I thought that this would be easy og just a walk in the park, never thougt that, and never will, the idea of making something with wheels never apealed truely to me, not that I don’t want to make some with wheels never but a person has to start with something and I have to start with what appeals to me and my inspiration and thats a bloody walking Tripod.
“If you put your mind to it, you can accomplish anything” Back to the Future - Doc Brown
Sorry if some of the above sound a little angry, thats not the intention, it’s early in the morning and write what I think and I just can’t take people limiting other peoples creativity and free thinking. I’m working on my Tripod no matter what people think or say because I can and I have an idea.
The thing is what one can’t make one learn to make, don’t wanna do something I can do without a lot thought or learning, wanna do something that I don’t know if I can and where I can learn a lot.
In the first video (in the link above) it does take ONE step. All the other videos are 3D rendering.
I’m not so sure the slip rings would be much of a problem (if that is how they’ve done it) The leg appears to “swing” into place rather than being powered, so for the mostpart of its movement, it probably doesn’t even have any sensory feedback.
When I’m elected project leader, each leg will have its own power source and communication with the central pod will be by radio link. No slip rings…
Frits has an amazing ability to categorise people. He can tell from 2000km away what impetus is likely to cause people to work maximally. In your case he knew that saying “you can’t do it” would cause you to increase your desire to prove him wrong.
Now, you WILL do it. It’s the LMR way.
(Hehe - I’m pretty sure you hate being told you WILL do something. I’m learning the Frits method of encouragement.)







{kind=link}
{kind=link}