This is my first attempt at building a robot form scratch. Hopefully by starting this project, it will give me the incentive I need to follow through. My son started me on this journey. Wish me luck.
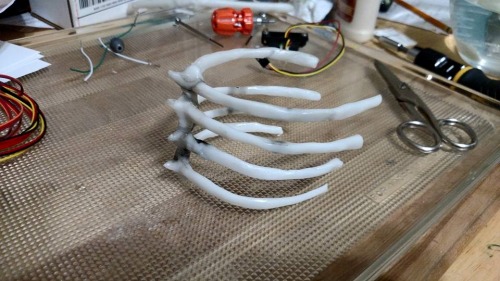
I haven't decided on the final look of the dragon, but I need a foundation to build uppon. Building a skelleton seemed like an obvious solution to this problem. I don't expect this to be an exact replica of a dragon skelleton, but rather something to model my support structure from.
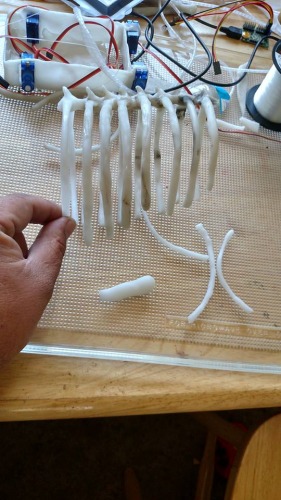
I love polymorph plastic, if for no other reason than it's WAY cheaper than buying a 3d printer. Of course I do like sculpting and this stuff is great for that too.
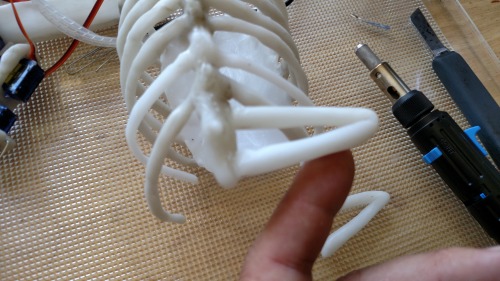
Progress has been slow due to work and family life, but it's progress none the less. Soon to come is the breastplate and shoulders. Not sure how this will come about, but I will think of something.
That is, or can be, a stable platform. So, good. If you desire for this to “walk” the CG should be just behind the shoulder blades.
How do you plan on making the joints? How will this be actuated? Have you weighed the polymorf so far?
I’m also working on a quadruped and have worked out much of the geometry and math. Mine does not aspire to look like nature so much as it does move like it.
This looks really great. Did you think about what to use for the brains of your robot? If you choose Arduino, you can adapt my code for Katka for walking https://bitbucket.org/thesheep/katka/src/tip/katka/
Yes… I plan on going the arduino route as soon as I buy a new one. I burned out the USB connector on my last one. As far as the servos for the legs, I have a Polulu 12 channel controller for that. It may not be enough for all of the features I have planned, but it will do to get the thing moving.
I haven’t settled on a design for the legs just yet. The plan is to use micro servos to actuate the joints. It’s kind of difficult for me to keep the skelleton theme and have huge servos poking out of the joint. There will probably need to be some compromises.
Well, if you go with a Pro Mini this time, you can easily make a nice servo breakout for it (http://sheep.art.pl/Servo%20Board%20for%20Pro%20Mini), and then no need for a separate servo controller. Arduino UNO/Pro MIni/Nano can control up to 12 servos with the default library. And you only need 8 servos to get a mammal-like gait.
If you are thinking about how to put all the servos in the body, maybe take a look at the Cheetah Cub robot for inspiration: http://biorob.epfl.ch/cheetah
That’s a great link on building a breakout board. I’m not completely set on using my pololu controller and the thought of building my own breakout does have its appeal.
As far as the cheetah cub robot, this is something I have been giving a lot of consideration. That thing is fast. My son would have all kinds of fun chasing the cats with it. So many options to ponder.
You can move the servos up the leg and run pushrods, this is about what an animal does with it’s muscles. That can also give you some leverage as the range of motion of the joint is often less than the servo, you can get more torque.
Some notes from my experiments:
I think the size and weight of this may be beyond what you can get out of the microservos. Design for around half of the servos stall torque, that is where it has the most power. Above that speed and efficiency falls to zero. An SG92 microserver is about 30 oz/ inches at 4.8v, so if the lever arm is 4" it will comfortable move 4oz and not budge 8oz.
You might consider twisted string actuators, since they are capable of great torque, are small, and very cheap:
That’s a good article. I did experiment with a cable (string) system using monofilament fishing line. However, this pushrod system seems much more promising. Thank you for the information.
If you want a robot mamal (like the Cheetah or Boston Dynamics Big Dog) 8 will suffice. If you want one that can sit and move like a dog or a dragon then you need another pair for the rear feet. Note that the dragon actually is walking on it’s toes. Getting rid of the rear feet is advantageous and not needed for speed.