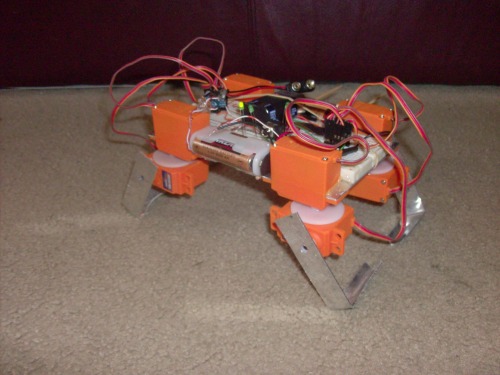
Clyde is a 8 servo quadroped walker, he was my first attempt at a robot before I had any sensors. Clyde is as basic as an 8 servo walker can get, one piece of aluminum for a baseplate, everything else hot glued to that. I wish I could post more pics, but the structure of LMR makes it a little tedious.
version two:
walks forward
Actuators / output devices: 8 servos
CPU: PICAXE 18M2 (main processor)
Power source: 4 AA batteries for servos and 1 9v for logic
lumi, Thanks, I thought I was onto something making a rather more square quad than most, turned out to be a bad idea so I just unglued the servos and reglued them on 90 degrees from where they were. although the walking patern is better, the steps are much shorter, so it takes a lot longer to get anywhere