

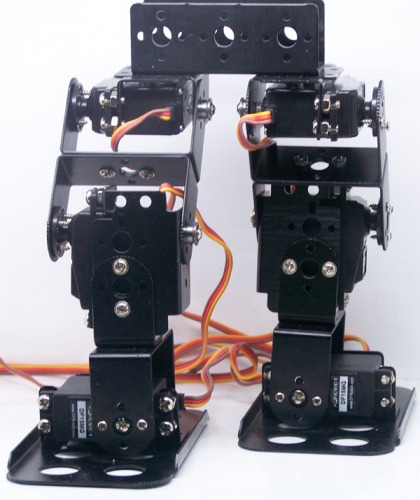
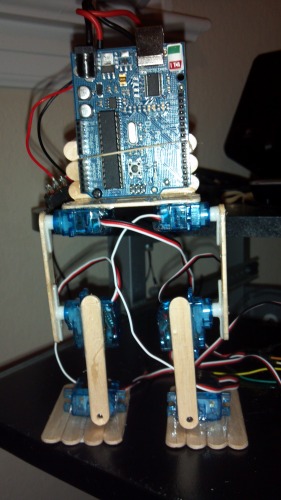
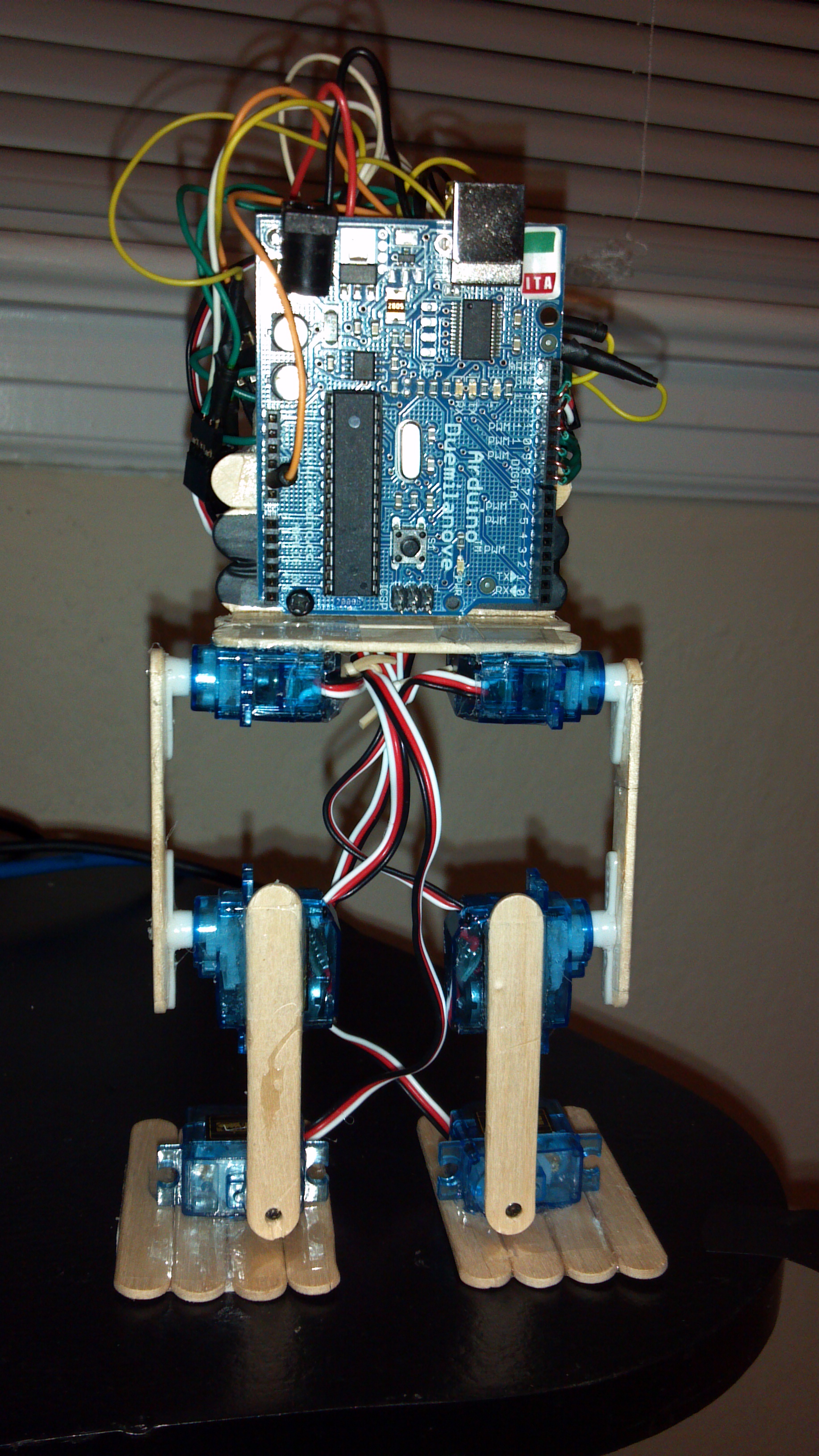
My idea is to remake the 6 DOF BRAT biped Kit, which retails for $299, for less the half the price using popsicle sticks and glue for the frame, cheap Hitec HS-55 Micro Servos and an Arduino for the brain. I already have my design drawn up and ordered the parts which I should get in a few weeks. Now to get started on the hard part. I have never attempted to write a 6 DOF (2 Ankle Servos, 2 Knee Servos, 2 Hip Servos as seen in the picture) biped walking gait code so this should be very interesting/difficult :). Any help, input, ideas or comments is welcome! Thanks!
Will update as I make progress. Stay Tuned
*Update: 12/19/2010*
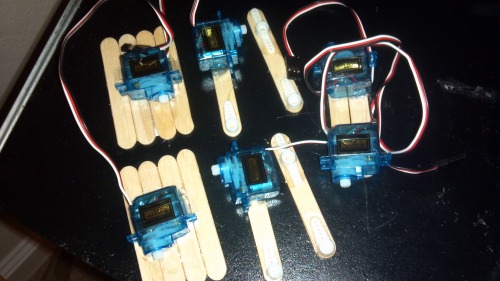
Servos finally came in the mail after a month. 8 servos for $17.10 on Ebay. $5.23 for Popsicle Sticks and Glue. Will recycle an Arduino from my object avoidance bot.
Parts: 6 Servos, Popsicle Sticks, Rubber Cement, Tape

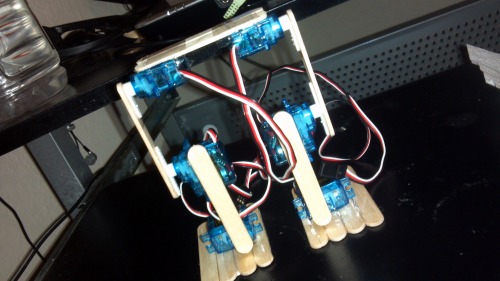
Took about an hour to build the Leg Sections and allow the Rubber Cement to dry. Used Scotch Tape to reinforce all glued parts.
Assembled the Leg Sections. Looks alot like the BRAT walker to me huh?

Issues:
How to add/balance the batteries pack and arduino.
Will these cheap micro servos and glue/tape joints be able to handle all the weight once the Arduino and Battery Pack are incorporated.
Can I properly power the Arduino AND all 6 servos and maybe an LED using 6 AA batteries connected in parallel? without potentially damaging any components?
Writing the walking gait code... writing code is NOT my strong point :( .. might take some time. HELP....
What do you guys think?
*Update: 12/20/2010*
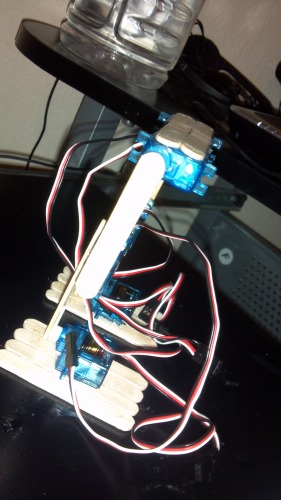
Drilled holes where the servo heads connect to the servo and used small screws to attach everything for extra support and strength.

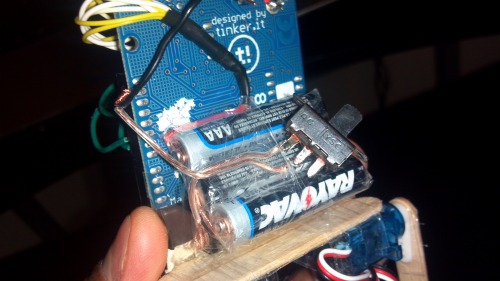
Added the Arduino and Battery Pack on top. Everything is balanced and pretty sturdy. Working on the code now.

*Update 12/21/2011*
Wired the Arduino, Battery, and Servos. Added an On Off switch.
*Update 12/22/2010*
Tried a couple of programs and a few make the legs move but theres always this constant shaking as soon as I turn the Arduino on. It does this when I set all the servos to center "servo.write(90)". When I try and turn the servos in one direction with my hand it pushes back... So far its been real good at balancing itself despite being heavy on top... no walking yet :(. See the video to understand better.
*Update 12/23/2010*
Thanks to ChristheCarpenter for the tutorial on for loops. Finished writing a working code and it took its first steps easily. Only issue now is the constant rattling as seen in the video will not stop. Sometimes It wont happen but the majority of the time it does. I tried bringing the voltage to the servos down from 7.2 V to 6.0 V and this did not fix the problem. Im now thinking maybe its due to the stress on them and they're shaking to try and maintain the position. The only problem here is that the only servos doing the shaking are the hip servos. Wouldn't the ankle servos be subjected to more stress when shifting weight to one foot. They do not rattle at all. Trial and error untill I get results....
*Update 1/6/2012*
I replaced the Hip Servos and they were working fine on 6.0 V untill i ran them at 7.2V and the rattling began again. Went back down to 6.0 V and it didnt go away. The lesson learned here is that 7.2V damages cheap micro servos. I reduced the size of the battery pack by using 4 1.5V AAA (= 6V) non rechargeable batteries. Going to upgrade to 5 1.2V (also = 6V) rechargeables.
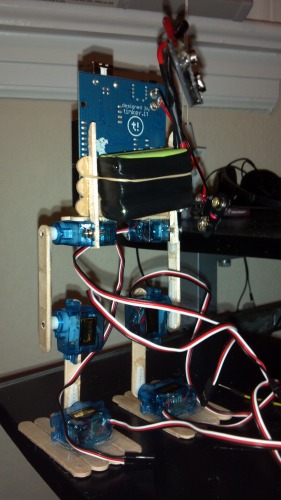
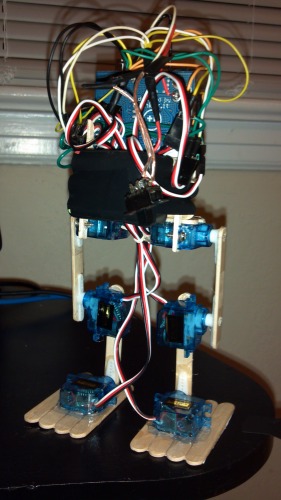
Also redesigned the top half using less popsicle sticks. The decrease in weight helped it ALOT. Made MANY improvements and tweaks to the code after HOURS of trial and error lol, it is now walking smoothly. Because of the cheap contruction (popsicle sticks and glue) and damaged servos causing it to wobble it can only walk stable at a slow pace.
Overall this project was a pretty good learning experience. Learned alot about writing Arduino code and biped construction. Not bad for my first Biped huh?
Chucky 2.0 Coming soon!
Planned Improvements: Upgraded servos, Object Avoidance, Stronger Construction, all while still keeping the price half of the BRAT Biped.
See 2nd video clip of it in Action!
Walk for now
- Actuators / output devices: 6 micro servos
- CPU: Arduino Duemilanove
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/chucky-1-0
