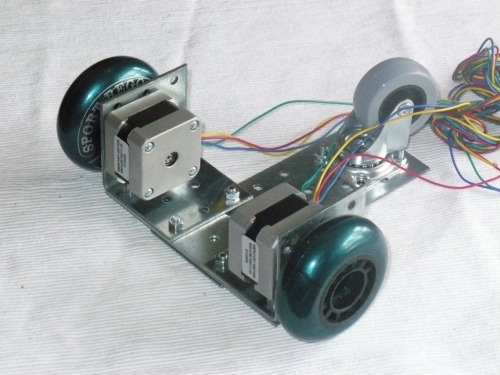
It will have three wheels, driven by two rather big stepper motors.
Arduino, motorshield and compass module will be mounted at top of the big SLA battery. Sharp IR Module and Sonar will be mounted on center pointing forwards. Reflection sensor will be mounted adjustable to "horns" in front of wheels.
Steel plates and angle steel with holes - bought from local hardware store
It's ALIVE!!!
I finished the chasis. I mounted the wheels directly to motors. I made a platform for Arduino, and breadboard from 5mm acrylic. The same acrylic i used to make bearings to wheels. I filled wheels center with hotglue.
Now i have installed ir-range sensor to front and compass module and made a program which it moves about 30cm and then rotates to find longest free way, then moves there and starts over. Mapping program is still under work.
For too slippery wheels i thinked that i would use bike's inner tube to cover wheels
...for next...
Lots of coding and testing
Make a videoclip
Attach Ultrasonic sensor
Attach reflection sensors and teach line tracking
Attach IR-Receiver for IR control
-- Update 24.8.2010 --
Mapping creating code is now ready and seem to work. I tried it with only sharp ir sensor, but range is so limited that i have to change to sonar ranging. I used OpenOffice Spreasheets to make a graph from X and Y coordinates. Bot is in the middle of the map and coordinates are in mm.
Navigate around and cartograph. Follow line and avoid obstacles
Actuators / output devices: 2x Stepper Motors
Control method: out of control :-)
CPU: Arduino Duemilanove (328)
Power source: 12v SLA 5ah
Sensors / input devices: Sharp IR, ultrasound, 2x IR proximity sensors, Compass module
Nice looking bot! I can’t wait to see it in action!
I’m also looking forward to see your mapping code, so far I have not seen any sample mapping code done on Arduino. I am struggling to implement some form of wavefront algorithm so the robot can follow a built in map. Then I’ll see how I can integrate the sensor readings to verify the map, correct the robot’s position, update the map, eventually build a map on a new location. Lot of work, hard to do for a hobby programmer…
Thanks. I havent noted a problem with compass yet, but maybe metalwork and motors will effect to compass. If then i could maybe make some kind of calibration.
My mapping code ideas:
Polygon like data structure, which will bend when new points are added
Filter function to remove unnecessary points (there ain’t too much memory)
Cartographer moves on the map which it creates
Map storing and loading from permanent memory
Calculating initial position from stored map if possible after reset
No progress so far. So much to do… but i have new modifications on my mind. I have gotten some servos 2x TowerPro MG995 which are now modified to contious rotating servos. I think i build another chasis from plexiglass for the robot. Changing battery to lighter was on my mind.
I have connected battery and arduino board with velcro so i can change chasis and battery very easily. Of course software must be modified also.
I have also got few lighter servos which i will use to make tilt & pan kit for sensors. IR and Ultrasound sensors are now mounted to piece of plexi, that will become a head for the robot.
I work onbigpersonal projectand Iam having problemsfinding a goodcode toArduinoto runmy twostepper motors.I would like tosee thecodethat you workon the coordination ofmotors withsensors.thank you, I awaitanswer.