



Cartographer
Here is my first robot. It's called Cartographer.
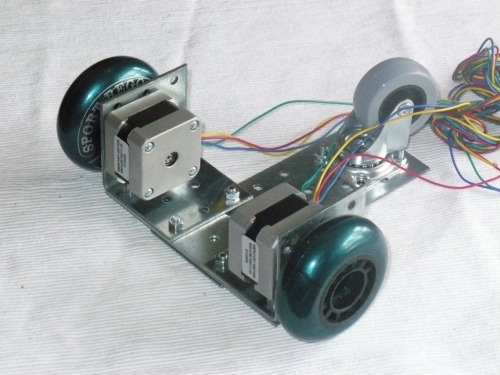
It will have three wheels, driven by two rather big stepper motors.
Arduino, motorshield and compass module will be mounted at top of the big SLA battery. Sharp IR Module and Sonar will be mounted on center pointing forwards. Reflection sensor will be mounted adjustable to "horns" in front of wheels.
Electonics & Power
- Arduino Duemilanove 328
- Adafruit Motor/Stepper/Servo shield kit
- 12v 5Ah Sealed Lead Acid Battery
Sensors:
Motors & Wheels & Chasis
- 2x Stepper Motors
- 2x 70mm Rollerblade wheels
- 1x Rotating furniture wheel
- Steel plates and angle steel with holes - bought from local hardware store

It's ALIVE!!!
I finished the chasis. I mounted the wheels directly to motors. I made a platform for Arduino, and breadboard from 5mm acrylic. The same acrylic i used to make bearings to wheels. I filled wheels center with hotglue.
Now i have installed ir-range sensor to front and compass module and made a program which it moves about 30cm and then rotates to find longest free way, then moves there and starts over. Mapping program is still under work.
For too slippery wheels i thinked that i would use bike's inner tube to cover wheels
...for next...
- Lots of coding and testing
- Make a videoclip
- Attach Ultrasonic sensor
- Attach reflection sensors and teach line tracking
- Attach IR-Receiver for IR control
-- Update 24.8.2010 --
Mapping creating code is now ready and seem to work. I tried it with only sharp ir sensor, but range is so limited that i have to change to sonar ranging. I used OpenOffice Spreasheets to make a graph from X and Y coordinates. Bot is in the middle of the map and coordinates are in mm.
Navigate around and cartograph. Follow line and avoid obstacles
- Actuators / output devices: 2x Stepper Motors
- Control method: out of control :-)
- CPU: Arduino Duemilanove (328)
- Power source: 12v SLA 5ah
- Sensors / input devices: Sharp IR, ultrasound, 2x IR proximity sensors, Compass module
- Target environment: indoors