I recently bought a kit for a lynxmotion phoenix hexapod with botboarduino and SSC32. After building, I uploaded a code and got the robot to walk with a PS2-Controller.
My problem is the following though: I just can’t calibrate the damn thing!
Evertime I try to calibrate with the according software (Hexapod Calibration) the SSC32 is not detected. When I try to check the SSC32 with LynxTermn I can’t detect it either.
I already know that the robot is functioning properly, but I can’t connect it to my laptop. Both, Botboarduino and SSC32 have power. I’m using a DB9 to USB cable.
I suspect that the DB9 Serial Port is not activated on the SSC32. Is that possible? I played around with different baud rate settings but nothing worked.
I read that those TXRX pins in marked in the picture need jumpers to activate the DB9 Port, but the assembly guide tells me to connect those with the BotBoarduino.
Any suggestions? I’m pretty desperate by now. I feel like I searched the whole internet but I couldn’t find a solution :-/
No worries about that. Since you got the hard part done (everything working), calibration should be trivial once you know the missing pieces of information!
Here are some of those missing details:
When the SSC-32 is connected to the BotBoarduino (as you have it in your image), the DE-9 is indeed deactivated. You can read more about it in the SSC-32 manual (#14). To activate the DE-9 port on the SSC-32, it needs to be connected to the UART TTL interface using two jumpers (as seen in this image).
The calibration of any robot using the SSC-32 involved setting offsets to the control signals of each channels (typically to compensate for mechanical assembly inaccuracies). All of these offsets are stored in EEPROM directly on the SSC-32. Therefore, you only really need to connect to the SSC-32 to perform calibration (BotBoarduino not needed for that step).
This leaves you with two main ways to go about doing your calibration:
Option #1) Disconnect the BotBoarduino from the SSC-32 serial interface by remove the wires from its TX/RX/GND. Reconnect the DE-9 interface by placing its two jumpers back. Connect directly to the SSC-32 as normal.
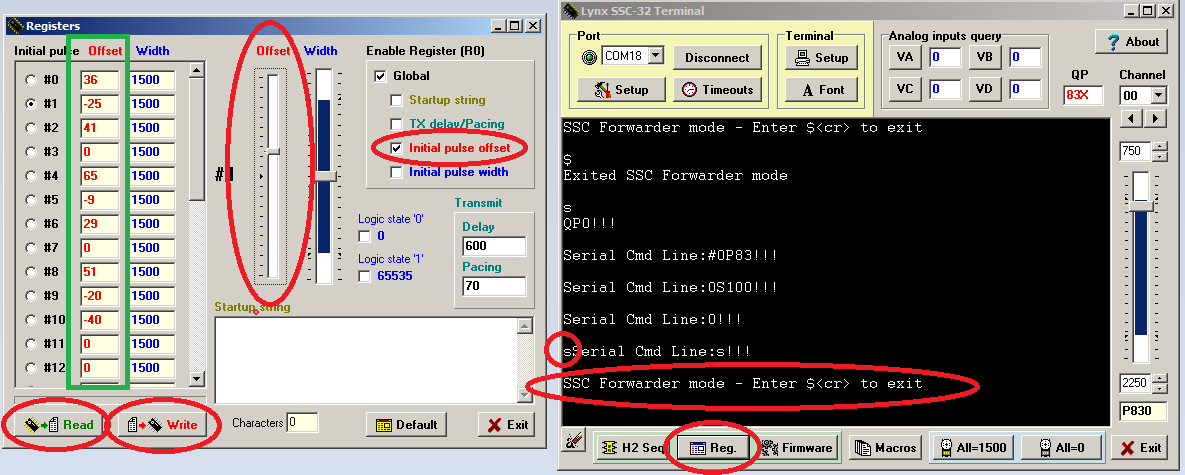
Option #2) Use the BotBoarduino as USB<>UART TTL passthrough. If running the Phoenix code on your BotBoarduino you can simply connect it by USB to your computer. This should show up as a COM port. The default baud rate for this one is 57600 (unlike the SSC-32, which should be at 38400). Connect to the BotBoarduino using Lynxterm and you should have a menu show up. If not, press the BotBoarduino reset button once. See the image below for reference.
thank you so much for your input! I tried both options and the second one finally worked!
I was working on this problem for weeks now and you gave me the final tip!
When that SSC-32 card was finally detected by the calibration software I literally gasped
The manual from lynxmotion just doesn’t give you all the info you need if you have no prior knowledge whatsoever.
I’m so happy now! You are a (robot-) life saver! The robot will be used to teach kids about how their movement is often based on insects.
Glad to hear that! I’m quite happy you were able to resolve your issues with the robot.
Please do not hesitate to post here some pictures or videos of the robot in use. We are certain the RobotShop community would be interested in seeing how you are using it.
Good luck with the project. Teaching others is always a great use of one’s time.





{kind=link}