* 5x Pololu Sharp IR Distance Sensor GP2Y0D810Z0F (these sensors are super awesome for line following, they give a reading above 800 on any dark black object. In this case its the black tape)
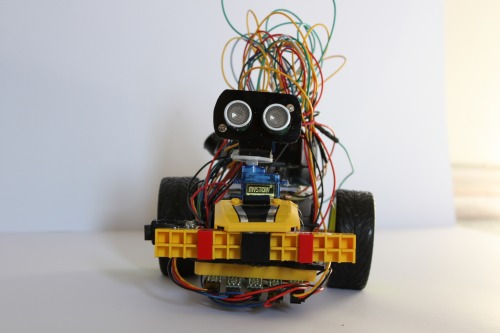
* and lastly, one good old SRF05 Ultrasonic range finder.
Additional parts:
For the head I used a SRF05 mount which I made a while a go using perspex sheets (same thing with the line following sensors). I also used my decision maker board (which I made in high school) for some cool lights. Thats all, and some Lego parts offcourse :)
NOTE: I am a picaxe user, it will take me some time to get used to the Arudino programming structure. This is my first code in Arduino after blinking an LED. If you think my code need to be improved, or if you have anything to say about it. By all means, please leave me a comment below :)
I used them on the analog inputs to elliminate the affect of light on them. When I use the digital inputs the sensors don’t give good readings if you shined a bright light on the line for example. I found out that using them on the analog inputs will ensure smooth line following.