biped notes
wow there’s just sooo many things I would do differently… where to start… 
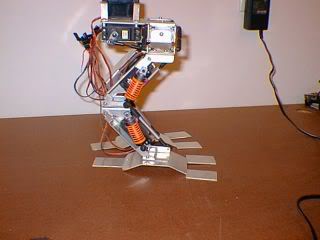
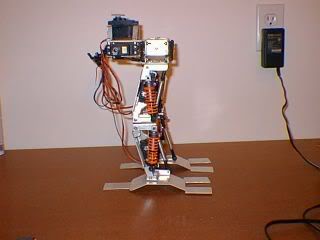
Materials: this one was constructed mainly from aluminum sheet, patterns were cut from cardboard and then traced to aluminum sheet and then hack sawed out to a rough shape and dremel tooled and sanded to have smooth edges. Aluminum is good, its fairly stiff and has little flex, this is important. I don’t think on this scale of a walker plastic or other material would work better unless you had custom parts molded so they could have braces inside to minimize flexing.
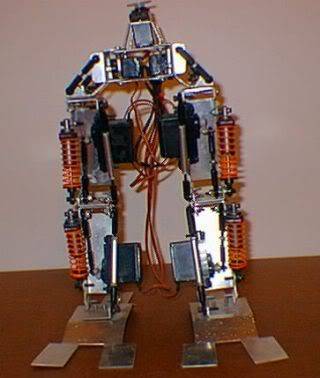
Flexing/Joints: this is a major problem on walkers, you are supporting a lot of weight on the feet and if you want it to walk smoothly it needs to have precision joints and NO(close to zero as possible) flex on the frame. The joints on this biped were part holes through aluminum with nuts and bolts and some ball-link connections (radio control linkages), the ball link joints work well and will last, the other joints needs to be much better to not wear out within a few minutes of use, leading quickly to a “floppy walking” robot. Any amount of slop in the joints, servo backlash etc translates into huge issues when balancing and walking.
Power: servo’s, these simply need to be much more powerful and higher quality than what I was using at the time. They need to be very powerful (on this size of walker should be at standard servo, 150oz/in torque, and be bearing precision servo’s.
Balance: weight shifting with a swinging battery on top is not the way to go, the legs should have the ability to have an additional degree of freedom at the hip/ankles to allow the robot to shift its weight over to one foot, take and step, and then shift back.
Biped thoughts
Build a first walker from something like a NXT kit, there are many you-tube video’s. These Lego bipeds work and I think they are a good way to start off learning how to build and control a basic biped.
http://www.youtube.com/watch?v=XdRzgwtMpUE&feature=related
This one is made with a NXT and works much better than the one I built, is far cheaper, and can be built in a few hours.
If you are looking to build a “real” biped walker with servo’s I think the better way to start off would be to purchase a kit, such as a RoboNova or Bioloid kit, this way you get good strong precision servos and at least a working model. Then you can take the parts and servo’s and build a cool mech style leg/frame or do other experimenting, and although the cost of the kits can be a bit high, in the long run it is cheaper than trying to purchase 12 or 14 servo’s and hoping they will work, be powerful enough etc etc.
Good luck with your walking robot experiments!
- I will try post some video’s of the leg sections working later today, still looking for the walking video’s.