

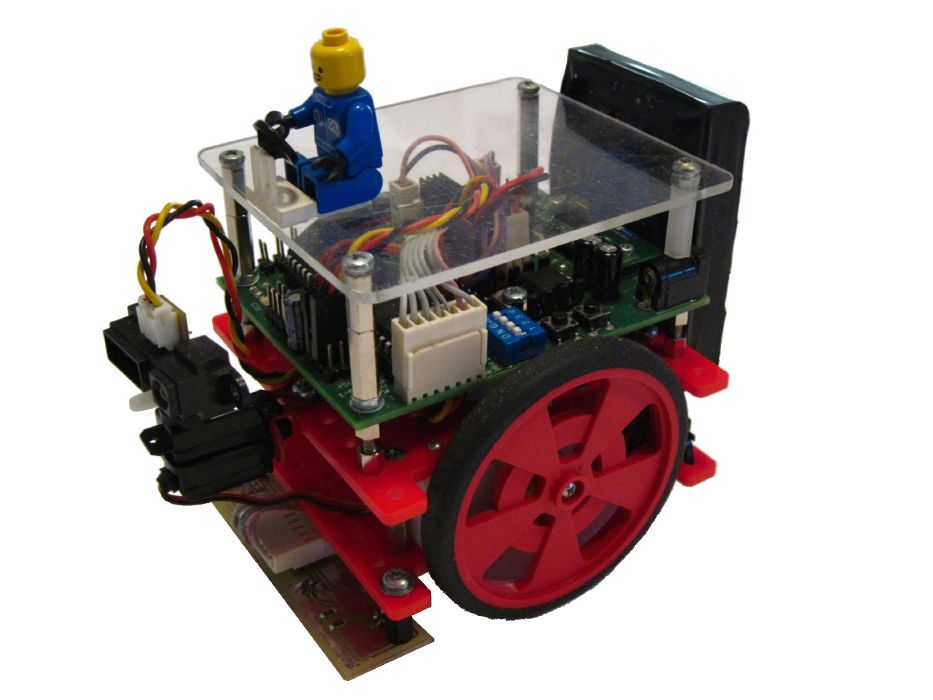
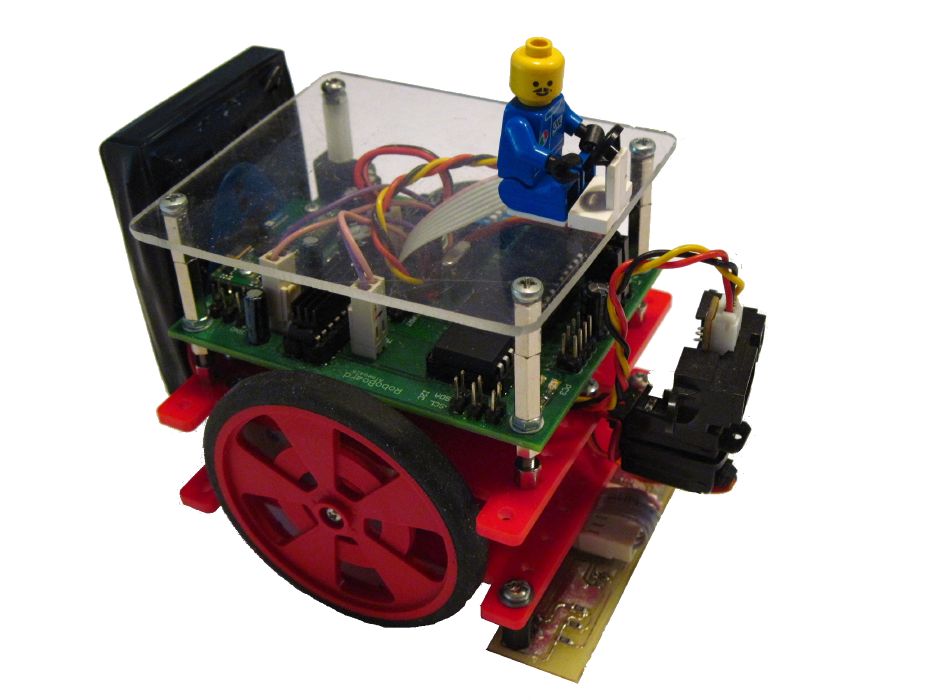
This robot is a line follower for ISTROBOT competition (www.robotika.sk/contest).
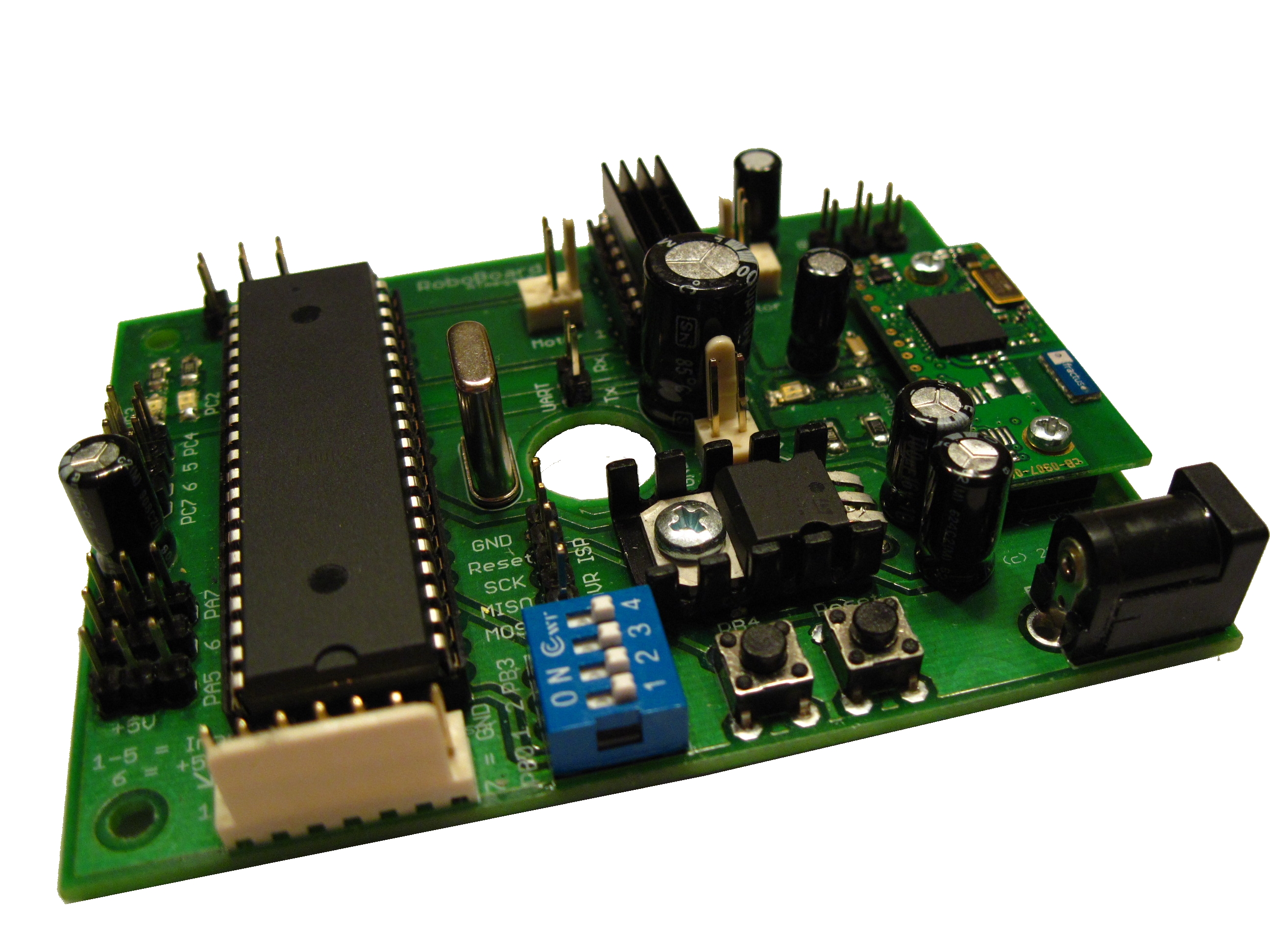
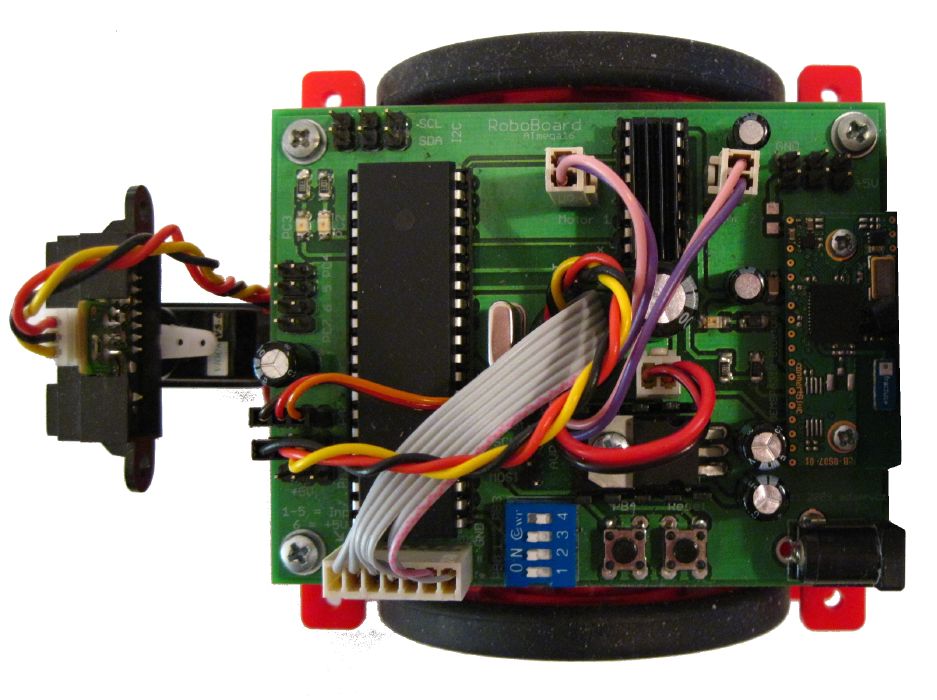
It's brain is ATmega16 AVR connectable to the PC via Bluetooth - this allows to have the board programmed wirelessly via AVR109-based bootloade or to run some nice rbot monitoring and controling program on the PC or a mobile phone.
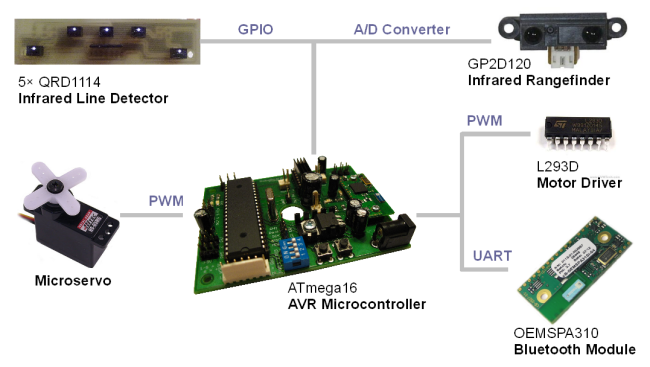
Line sensor is made of 5 QRD1114 reflectance sensors, the robot has also one GP2D120 IR ranger with analog output mounted on a microservo.
The gear is modified kit from our local robot store (in the Czech republic). Motors are driven by L293D.
More info on my website - projects.adamh.cz/LineFollower :-)
The attached video shows one of the first test with line senro - now it uses PID regulation which looks much better.
Avoids obstacles, follows the line
- Actuators / output devices: two geared motors
- Control method: Bluetooth
- CPU: ATmega16 AVR
- Power source: 6× AAA cells or 12V adapter
- Programming language: C
- Sensors / input devices: GP2D120 IR
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/bender-the-line-following-robot


