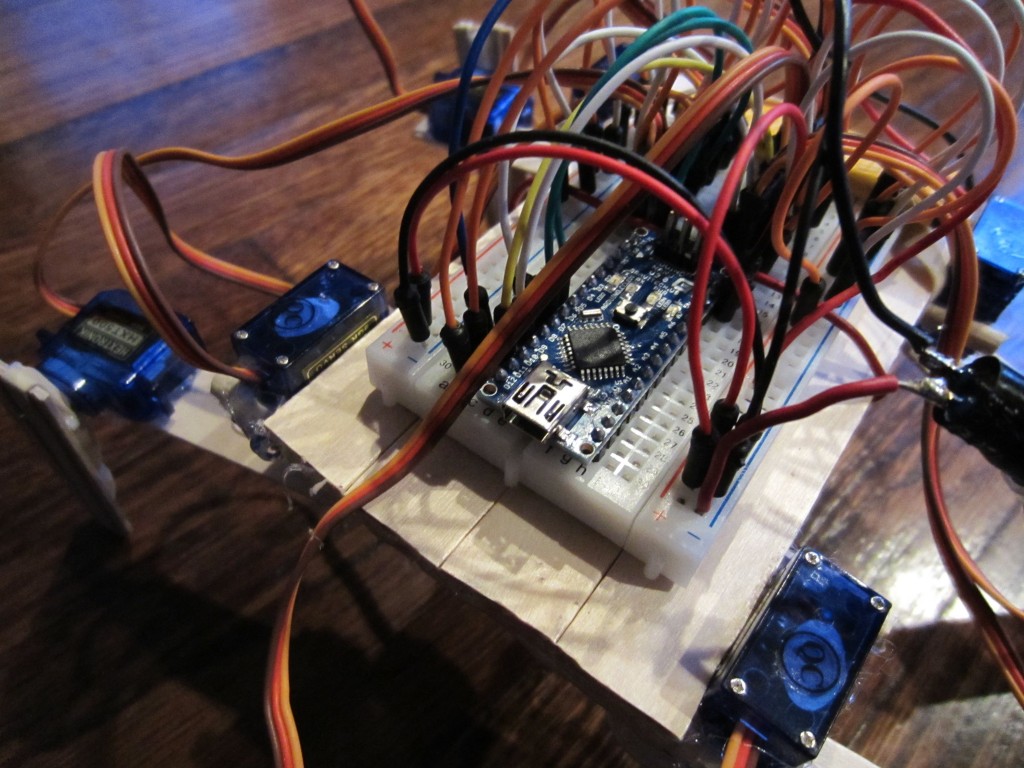
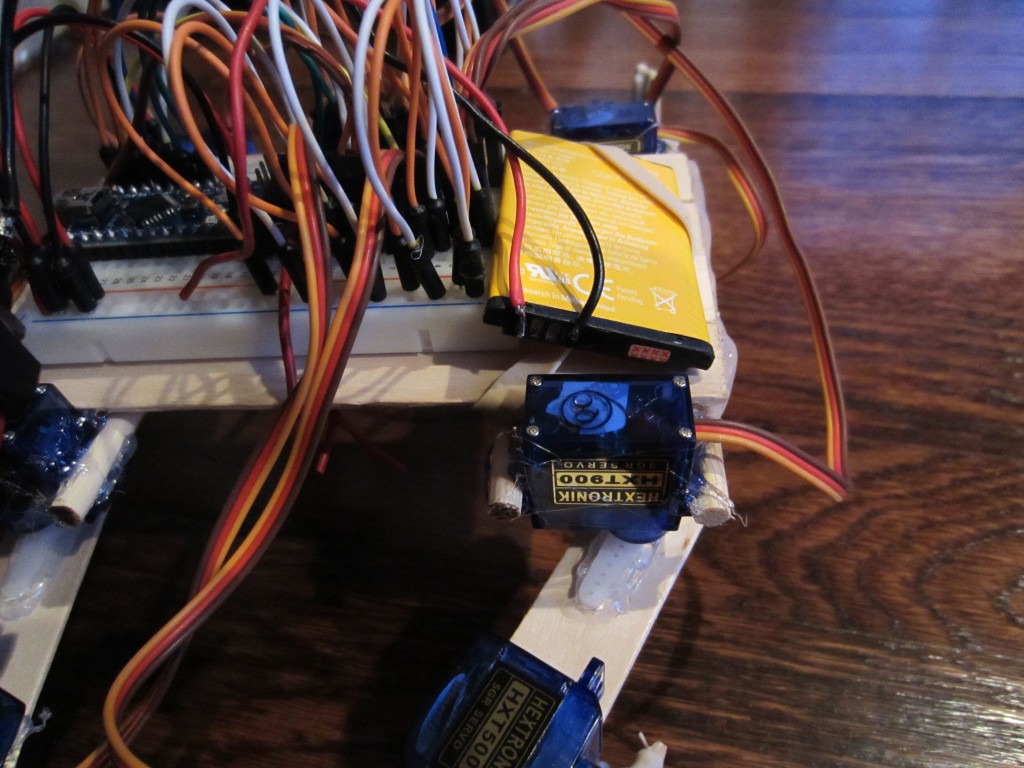
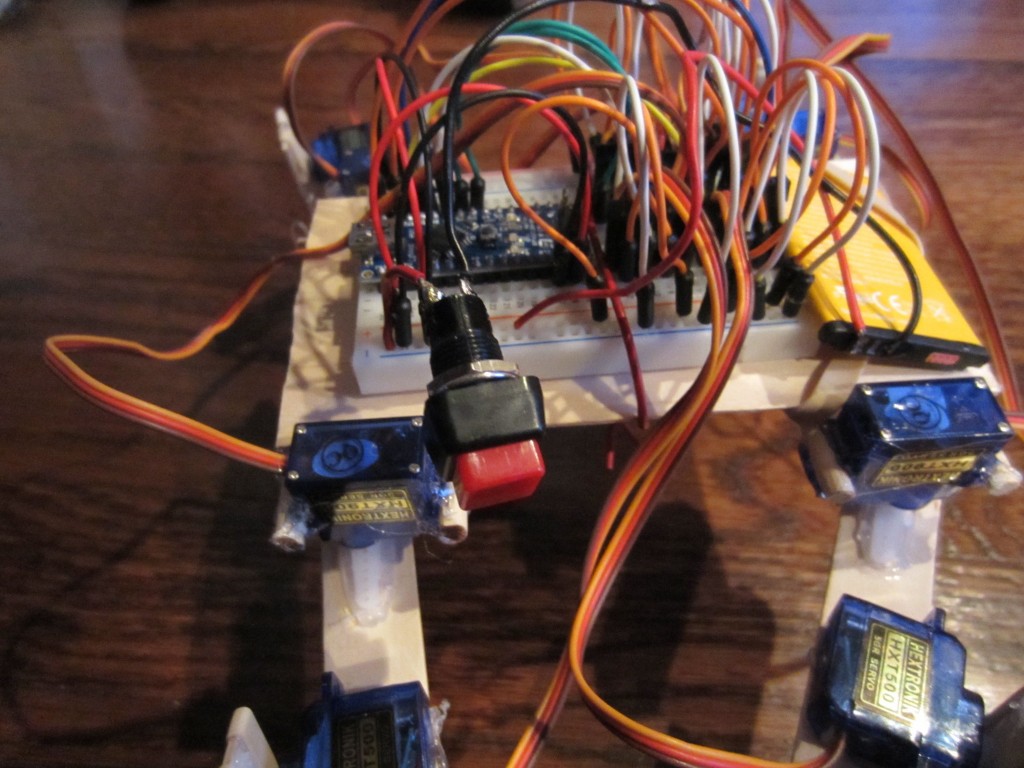
All the credit should go to lumi for making his Chopstick Junior 1.0 robot. I was very inspired by his work and had to make something of my own. There are some changes in the robot, but mostly it the same. Just used popsicle sticks for the legs instead of the chopsticks and used a blackberry phone battery (model BAT-11004-001) 3.7v.
I still need to add a sensor for the eyes and more grip to the legs so it can walk better.
Hey your walker is looking good. Is it just a prototype to test feasability for say, a hexabot or is it still being improved (in terms of swapping the breadboard with an etched one)?
What kind of servo-controller do you use because an Ardiuno obviously can’t provide 8 servo signals (at least not all at once )?
Is it hard to program a walking gait for this robot? All walkers I have seen do have a fairly complex program running on their microcontrollers because of the inverse kinematics (that of course gets worse with the number of legs you’ve got).
In the last few weeks I really got hooked on legged robots :D
for the coding part you should contact lumi as I mentioned in the first paragraph. He has done all the coding in arduino IDE. I have just build the robot with the parts I had around my house and loaded his code. I am not very good at coding something from scratch so I just use/borrow codes from others. I am not using any other servo controllers. Everything is controlled by the arduino nano board.
The reason behind going with a breadboard instead of something permanent is because I get bored with things too easily, this way I can take things apart and put them to a different use without having to sacrifice anything.
Please update this when you do and let me know the progress.
About Torrentula’s question. The Arduino Nano provides 14 digital I/O’s, so that’s more than enough to control 8 servos and still keep 6 free for other use. And yes, i did the programming by myself out of scratch…and it’s not a funny task. after 2 nights i got it walking without falling.


 )?
)?