Here is my first robot using a micro-controller ! I started with the Start Here guide and it evolves a bit. I rewrote the code, it might not be as good as the orginal, but it was the best way to understand how it works !
So, this robot simply wanders around, avoid obstacles and detects when it gets too close of an edge (and randomly, change direction). A piezo speaker and 2 Leds help this little guy to communicate with the outside world ;)
The code is attached. There's a bit of "dead code", I had planned to build a robot kinda "schizophrenic" : it would change his behaviour randomly and/or on some events (I am not sure I'll add that, I have an other robot in mind ;)
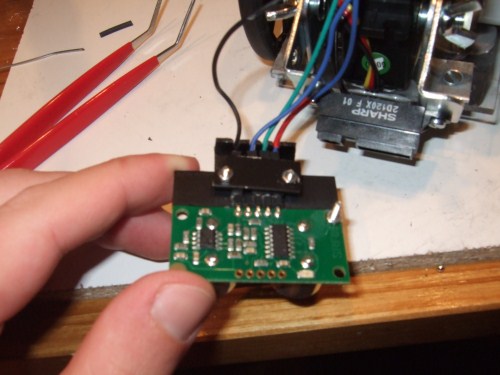
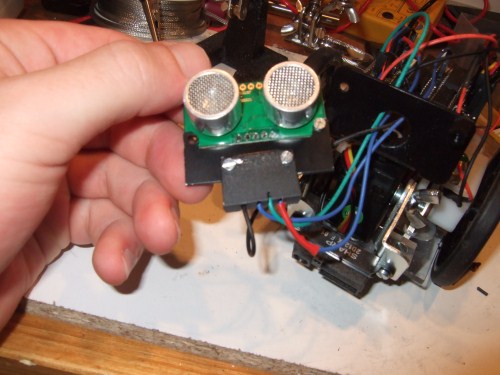
I had a little problem with cables from the SRF05: they always got detached after a few seconds when the servo's head was moving. So I made a support to keep them in place.
SRF05 support for cables from behind
SRF05 support for cables
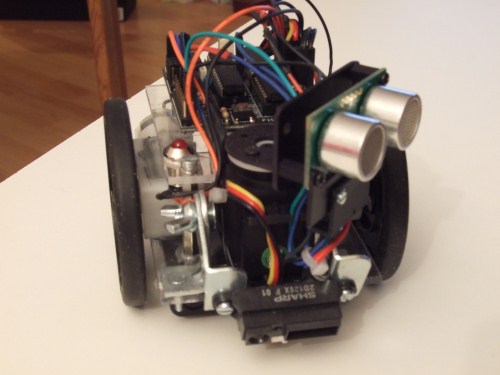
The edges sensor (a Sharp IR sensor), its angle can easily be modified
View from behind
A micro-switch turns on/off the robot. The piezo speaker is screwed under the top plexi panel.
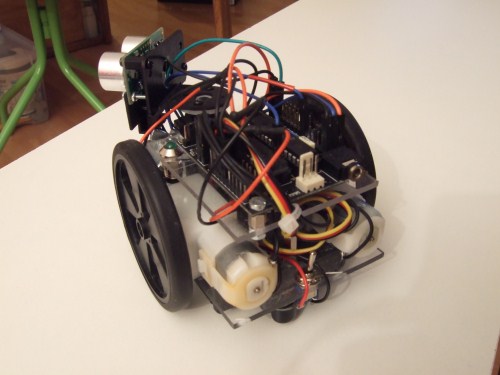
The 2 leds
I used 2 ball casters to stabilize the robot better
Hi, I like your robot,fast and good looking too. I should try to add on a few outputs too on my robot. I will take a look at your code,thanks for sharing.
Yes I agree with you my friend,I like sound on robots. I will get a piezo,will it be connected directly to the output pin and ground,or it needs other components to work? Got one with 3 wires but it doesn’t seem to work,since I got it many years ago.
I only have 2 wires on my piezo. It is connected to the outpin threw a 330 Ohms resistor (if you are using the same resistor array than the one from the Start Here, you already have what you need and to ground.
Hey my friend, I’ve programmed my tracks robot with your code, installed an IR sensor in front beaming the floor at a 45 deg and also the 2 leds ;) Works fine but I have to work on the code because the robot gets into the same patern in front of a wall and he can’t take the right decision moving left and right for a while… Since programming is not so easy for me,if you can give me a hint where to look at inside the code,i would appreciate it. Thanks.
I’m honored you tried my code on your robot… especially if it worked
The algorithm is far from being perfect, I wrote it in one night and stopped as soon as I had something acceptable So it can definitely be improve ! A few leads you could follow :
- when an obstacle get too close (“dangerDistance” in the code), check both side to choose which one is the better instead of going backward and turning right. Or you could make a random choice of the direction to go, like I did when an edge is detected :
I didn’t implement that because the robot would have to stop in order to check each side, and I wanted it to be always moving.
- you could add some more random choices, it would give the robot an impredictive behaviour
Anyway, I let you find great ideas ! All the code dedicated to make decision in front of an obstacle is in the “AnalyseCurious” method : firstly the robot check for any edges, then it checked for obstacles and take a decision according to the current distance (if the mesured distance is less or equal to the “dangerdistance”, it goes backward and turn right, if the mesured distance is greater than the “dangerdistance” and lesser than the “avoidingdistance”, it softly turns to the opposite direction of the servo’s position).
Knowing that, you can change values for “dangerdistance” and “avoidingdistance”, add new constants etc. !
Thank a lot for you kind answer,I appreciate. Also “merci” for your hint on the code modification,I will try to make some changes and give a try. I wanted to create my own tone sound but I have an alarm system 12v piezo,it wont produce all the frequencies that I need. Will let you know what happen next. Take care my friend and I’ll keep track on your progres too. You are a great inventor.
I like the use of ultrasonic sensor on a servomotor : it’s like the white rabbit alway late and a little paranoiac (is there something here, and here, …) lol