


An other Start Here inspired robot
Hi all,
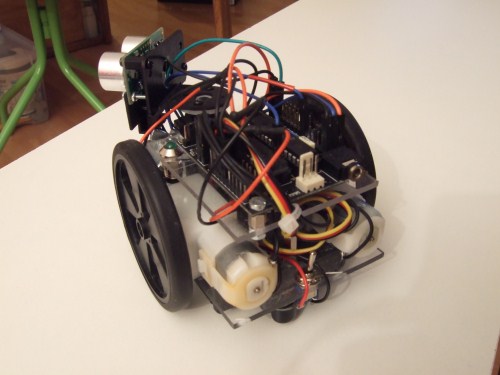
Here is my first robot using a micro-controller ! I started with the Start Here guide and it evolves a bit. I rewrote the code, it might not be as good as the orginal, but it was the best way to understand how it works !
So, this robot simply wanders around, avoid obstacles and detects when it gets too close of an edge (and randomly, change direction). A piezo speaker and 2 Leds help this little guy to communicate with the outside world ;)
The code is attached. There's a bit of "dead code", I had planned to build a robot kinda "schizophrenic" : it would change his behaviour randomly and/or on some events (I am not sure I'll add that, I have an other robot in mind ;)
I had a little problem with cables from the SRF05: they always got detached after a few seconds when the servo's head was moving. So I made a support to keep them in place.
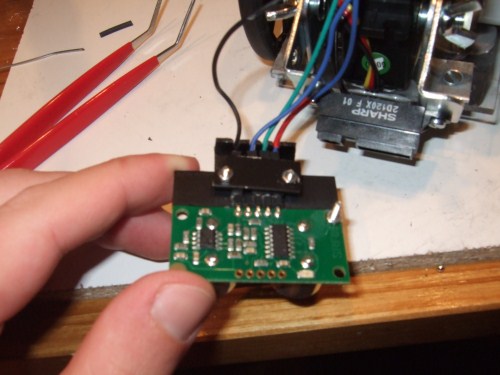
SRF05 support for cables from behind
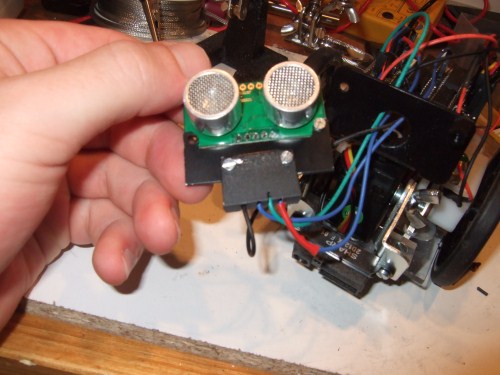
SRF05 support for cables
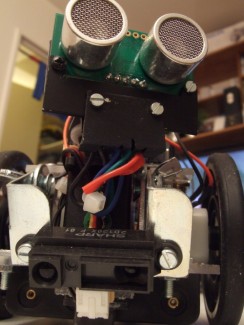
The edges sensor (a Sharp IR sensor), its angle can easily be modified
View from behind

A micro-switch turns on/off the robot. The piezo speaker is screwed under the top plexi panel.

The 2 leds

I used 2 ball casters to stabilize the robot better

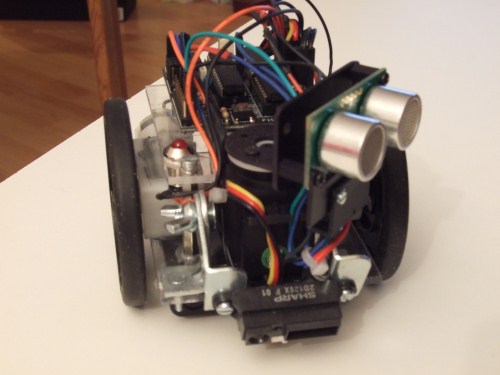
And here it is :)
It wanders around, avoid obstables and dosent' fell from edges
- Actuators / output devices: 2 geared motors, a couple of LEDs, piezo speaker
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4x AA (1.2V)
- Programming language: Picaxe basic
- Sensors / input devices: SRF05, 1 Sharp InfraRed Sensor
- Target environment: indoor