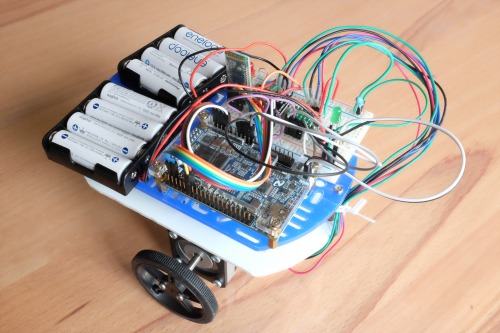
It 's my first step to build a robot, controlled from Android phone.
Robot alone, uses stepper motors in microstep mode.
The movement of robot can be controlled from Android-app in two modes: Sensor mode (first video) or manual mode (with sliders, second video)
Android application transfers the velocity commands on Bluetooth (self made, you can load from Google Play, source on Github: https://github.com/JanDebiec/Arobot_android/tree/develop).
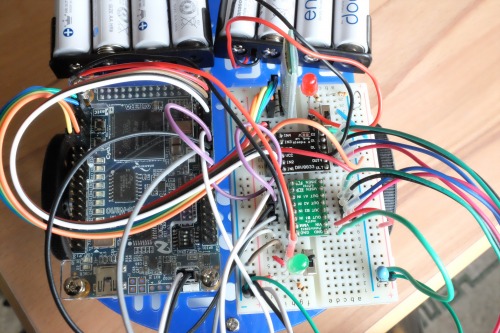
Robot's Intelligence: it's a Altera evaluation board, with C4 FPGA (https://www.terasic.com.tw/cgi-bin/page/archive.pl?CategoryNo=139&No=593)
FPGA Controller was written in VHDL (source on Github: https://github.com/JanDebiec/Arobot_fpga)
Links to Youtube videos:
https://www.youtube.com/watch?v=e7yvlPLXhfI
and
https://www.youtube.com/watch?v=pzsFKrqKox8
My plan is to change the interface from Bluetooth custom commands to ROS topics.
Then the following work must be done:
Android app will be based on rosjava,
and robot will have the Rapsberry-pi with Wifi as the controller for ROS software. Raspberry-pi will transfer the commands to FPGA on SPI interface
I‘ll appriciate any sugestions, ideas or cooperation.
You can visit my page: https://www.jandrotek.de/
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/a-robot-with-stepper-motors-driven-from-fpga-controller
Images / Videos
FYI - included placeholder image of FPGA - feel free to change it. They way you write - the project is complete? It would be nice to see images / videos.
FPGA
Any reason for not including a soft core CPU inside the FPGA instead of a RPi?
@ggallantCPU inside the FPGA
@ggallant
CPU inside the FPGA is an obvious option. the first design is without CPU.It’s only BT receiver and pure FPGA.
CPU, inside or external Rpi will be used for ROS version. The FPGA with internal CPU have some drawbacks:
little bit higher cost. lack of Wifi,
@ CbensonThe first version
@ Cbenson
The first version of project is ready and running. (The frist version: Android + BT + Cyclone C4)
My problem is: it is the first time I am writing here on that LetsMakeRobot page.
I have placed the proper picture and the links to YouTube, but they are gone
FPGA
RPi with wifi is attractive. XESS has a RPI shield of sorts. I have one but never used it.
http://www.xess.com/blog/raspberry-pi-xula/
The first version of project
The first version of project is ready and running. (The frist version: Android + BT + Cyclone C4)
The picture:
it is the first time I am writing here on that LetsMakeRobot page.
I have placed the proper picture and the links to YouTube, but they are gone.
I’m trying to change, still without success
Robot
I’ve updated the image - nice robot! I also see you’re using Eneloop rechargeables - nice!
Looked at your YouTube page to se if you had other robots (not yet)… so looking forward to seeing what you create.

