


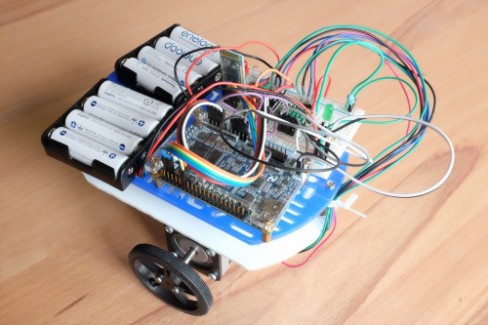
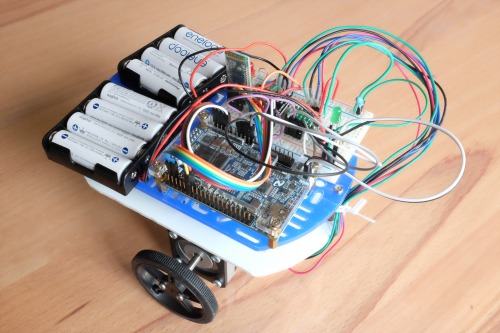
A robot with stepper motors, driven from FPGA controller
It 's my first step to build a robot, controlled from Android phone.
Robot alone, uses stepper motors in microstep mode.
The movement of robot can be controlled from Android-app in two modes: Sensor mode (first video) or manual mode (with sliders, second video)
Android application transfers the velocity commands on Bluetooth (self made, you can load from Google Play, source on Github: https://github.com/JanDebiec/Arobot_android/tree/develop).
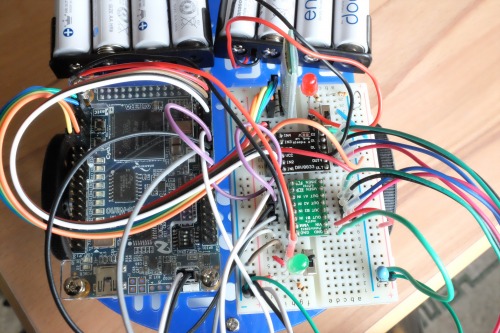
Robot's Intelligence: it's a Altera evaluation board, with C4 FPGA (https://www.terasic.com.tw/cgi-bin/page/archive.pl?CategoryNo=139&No=593)
FPGA Controller was written in VHDL (source on Github: https://github.com/JanDebiec/Arobot_fpga)
Links to Youtube videos:
https://www.youtube.com/watch?v=e7yvlPLXhfI
and
https://www.youtube.com/watch?v=pzsFKrqKox8
My plan is to change the interface from Bluetooth custom commands to ROS topics.
Then the following work must be done:
Android app will be based on rosjava,
and robot will have the Rapsberry-pi with Wifi as the controller for ROS software. Raspberry-pi will transfer the commands to FPGA on SPI interface
I‘ll appriciate any sugestions, ideas or cooperation.
You can visit my page: https://www.jandrotek.de/