Well, here's a fun one I built out of a bunch of parts stolen from one of my first bots:
https://www.robotshop.com/letsmakerobots/node/589
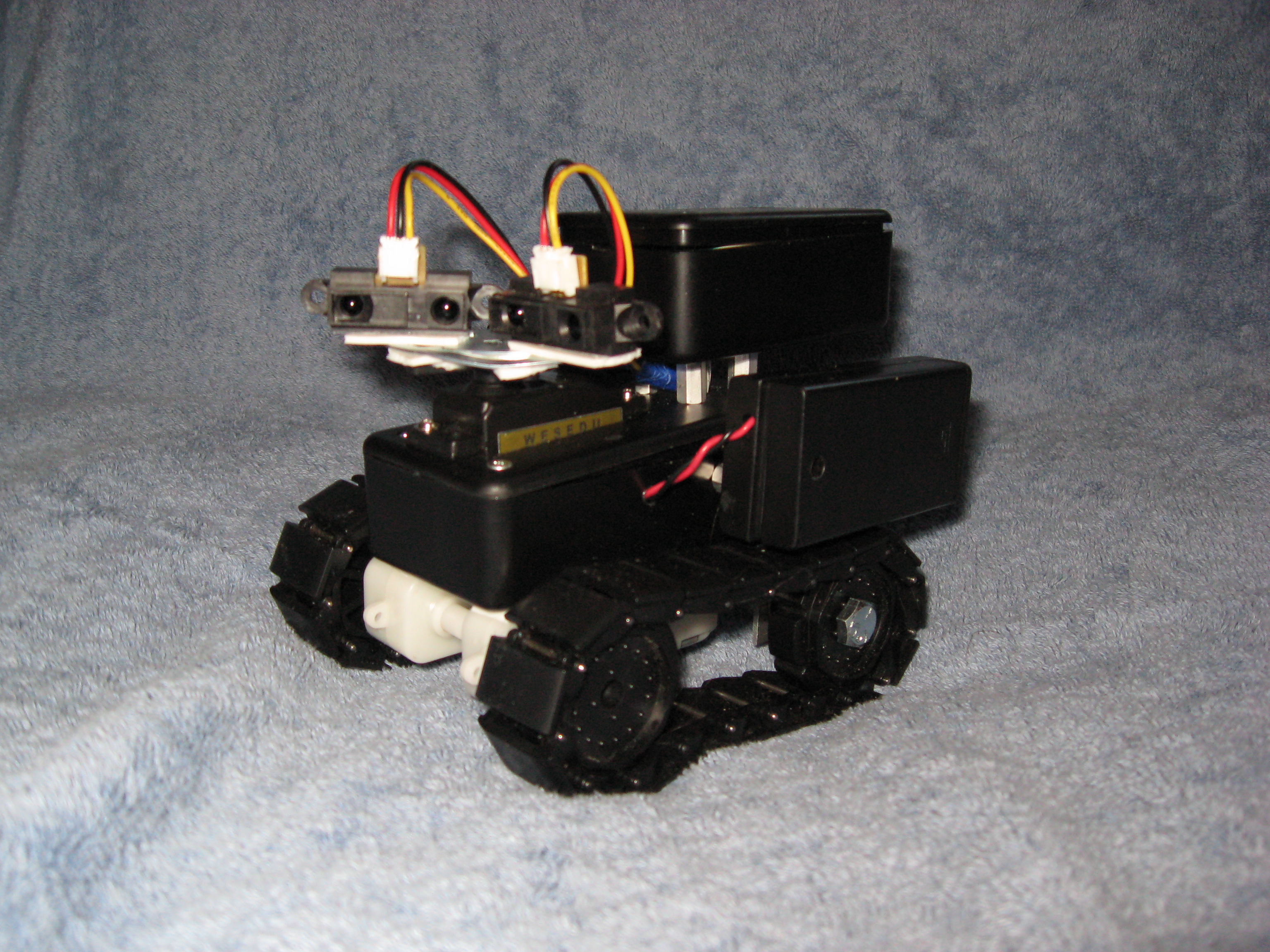
Right now I am just running some super simple code just to get it moving around. I have used the "crossfire" arrangement of the IR sensors on a couple other projects and it seemed to work well. I have never used this placement on top of a servo before though. As of yet the servo is hooked up but not coded to do anything. Eventually I will be interested to see what I can do with a little head sweep- To each side one sensor will be looking directly forward (while being left or right of center) and the other aiming directly to the side. It will be neat to see just how narrow an opening it will be able to fit itself through. --That is if I can stuff that many lines of code in this little picaxe 14M.
On my last robot I used an encoder on one of the wheels to judge turns and distance traveled and it works great. I still have some inputs left on the board so I am considering adding one on this little guy.
Also- I have another robot idea in the back of my mind and this robot might end up being the "tow" vehicle for that project... We'll have to see.
--Video soon--
Drives around aimlessly...
- Actuators / output devices: (2) GM9's
- Control method: All by itself
- CPU: Picaxe 14m
- Power source: (2) 2-AA Packs
- Programming language: Basic
- Sensors / input devices: 2 sharp IR distance
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/a-little-trackbot-from-recycled-parts
Cool little guy.Getting the
Cool little guy.
Getting the distance between the ‘walls’ should be pretty easy I would think. Here’s some psuedo code.
If distace_left < Danger and Distance_right < Danger
Then move forward
Else
Turn
Mind you, this is from a guy who has yet to build his first bot, so take it all with a grain of salt 
How well do the sharp IR
How well do the sharp IR sensors work? I only have a SRF05, but would love to find cheaper range finders. These run $8-$10 versus $30 for the SRF05. The specs say the sharp is good for 1 inch to approx 12 inches in range. This would work for most applications except maybe Frits’ wall racers. I think the speed of the car would take it into the wall before the range finder saw it.
It also looks like it has 3 pins, voltage, ground, outpin. does it really just keep sensing all the time? The SRF05 had to be told when to measure.
Sharp IR’s
Well, you get what you pay for… The IR sensors work great, period. However, after about 10" their accuracy drops off A LOT. Also the code they spit back skips around a bit where as the ultrasound sensors are wicked solid. The other thing is the IR’s need to go into an adc channel (if you use picaxe) -They are not digital. Other than that they work great! -No need for a trigger command either, they are always sending back data. Bottom line: if you have a small robot, in small places and/or a slow one, they work great. --And Cheap!
www.rocketbrandcustom.com baby!!
This is a very fashinable
This is a very fashinable project!!
I know it’s sexy, frits…
Work in progress, yes, but I thought it was about time that one of us made a robot without all the wires and boards showing!!
www.rocketbrandcustom.com baby!!
Ahhh…its a tiny tank
Ahhh…its a tiny tank before there WAS a tiny tank! -lol
You should put this lil guy in a clear plastic box for the CtC hall of fame!