


A Little TrackBot (From Recycled Parts!!)
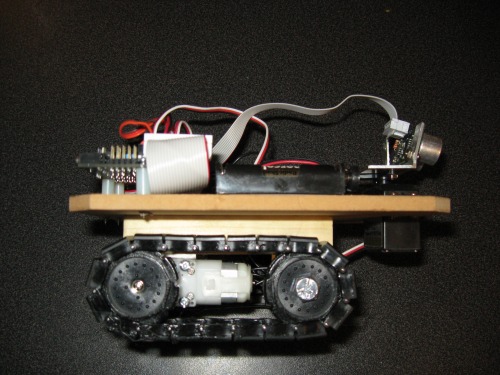
Well, here's a fun one I built out of a bunch of parts stolen from one of my first bots:
https://www.robotshop.com/letsmakerobots/node/589
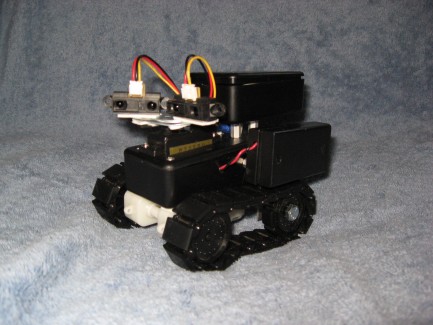
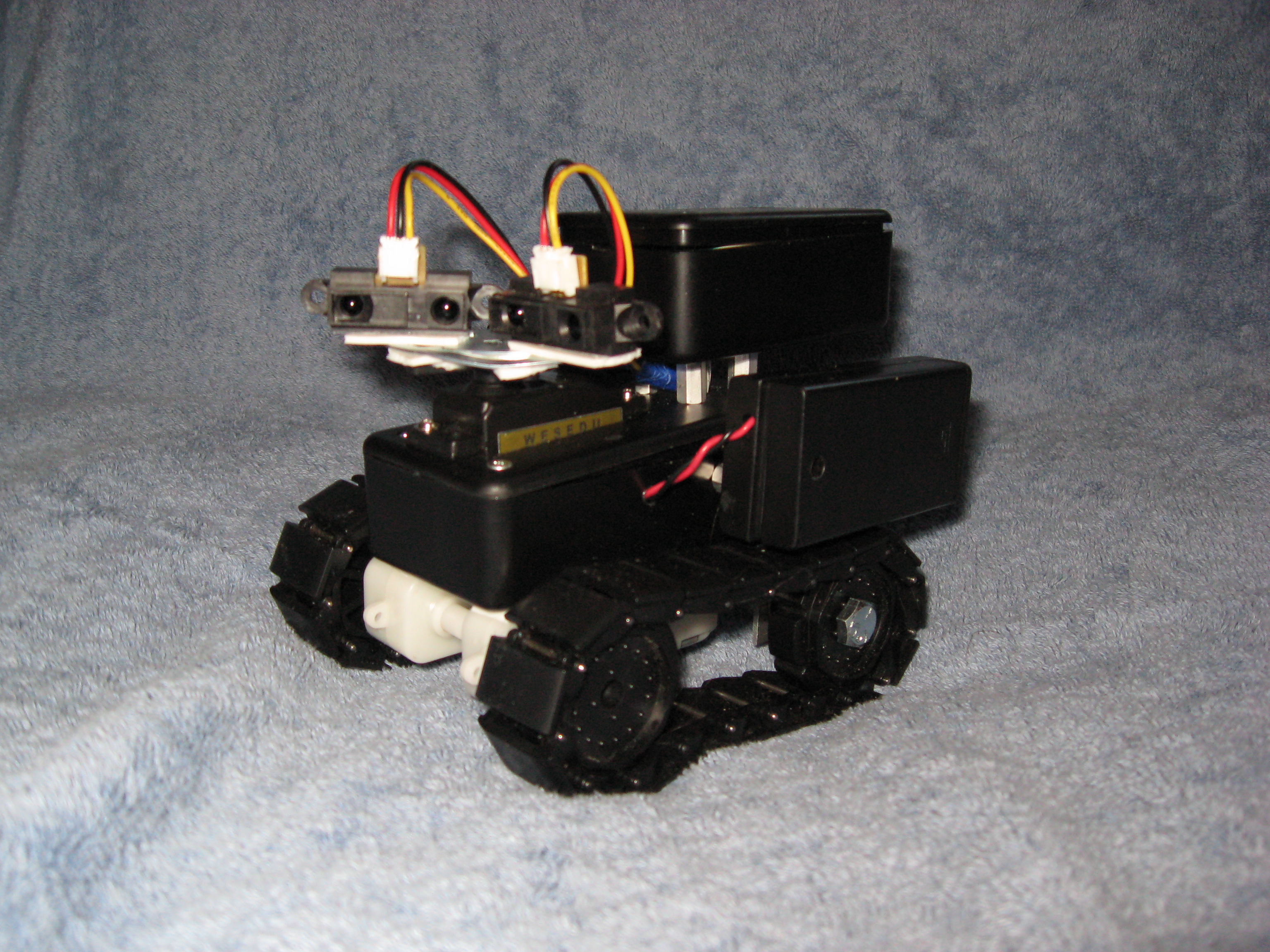
Right now I am just running some super simple code just to get it moving around. I have used the "crossfire" arrangement of the IR sensors on a couple other projects and it seemed to work well. I have never used this placement on top of a servo before though. As of yet the servo is hooked up but not coded to do anything. Eventually I will be interested to see what I can do with a little head sweep- To each side one sensor will be looking directly forward (while being left or right of center) and the other aiming directly to the side. It will be neat to see just how narrow an opening it will be able to fit itself through. --That is if I can stuff that many lines of code in this little picaxe 14M.
On my last robot I used an encoder on one of the wheels to judge turns and distance traveled and it works great. I still have some inputs left on the board so I am considering adding one on this little guy.
Also- I have another robot idea in the back of my mind and this robot might end up being the "tow" vehicle for that project... We'll have to see.
--Video soon--
Drives around aimlessly...
- Actuators / output devices: (2) GM9's
- Control method: All by itself
- CPU: Picaxe 14m
- Power source: (2) 2-AA Packs
- Programming language: Basic
- Sensors / input devices: 2 sharp IR distance