

Hi
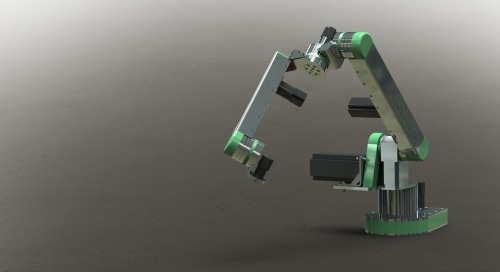
I'm currently building a robotic arm as a graduation project, which I named A.R.M. (Articulated Robotic Manipulator).
I would like to add that I'm following some courses about inverse kinematics and basic programming at the moment.
Some specifications:
- 6 DOF
- Reach: 1 m
- Payload: 2000 g
- Power source: 48-55V DC
- Budget: +- €1500
Progress:
The mechanical design is completed and the robot is being built at the moment.
I've ordered the drives and I'll be buying an arduino soon.
Problems:
- I've calculated the needed torque for each motor (stepper motors will be used) via static calculation. This had to be done fast, so I've used big margins. Still, I would like a dynamic calculation to add to my thesis. If anyone has tips for this, help is much appreciated! On the Internet I often find static calculations, and I'm wondering if anyone bothers to do a dynamic calculation? I also didn't find dynamic calculators, where there is an abundancy of static calculators (some better than others).
- I'm looking for a cheap gripper of other actuator, but this seems to be harder than I thought..
- I'm wondering what the next steps are, since this is my first project.
Kind regards
Matthieu
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/6-dof-robotic-arm-a-r-m