

Calculateur de couple de bras robotique

Le calculateur de couple de bras robotique est destiné à vous aider à choisir le bon moteur pour chaque articulation de votre bras robotique. Le couple (T) nécessaire à chaque articulation est calculé comme pour le pire des cas (levée d'un poids à 90 degrés). Vérifiez que vos unités sont compatibles. Les unités les plus courantes sont Kg/cm et oz/in (once/pouce). Jetez un œil au Tutoriel du Couple pour un bras robotique pour obtenir plus d'informations.
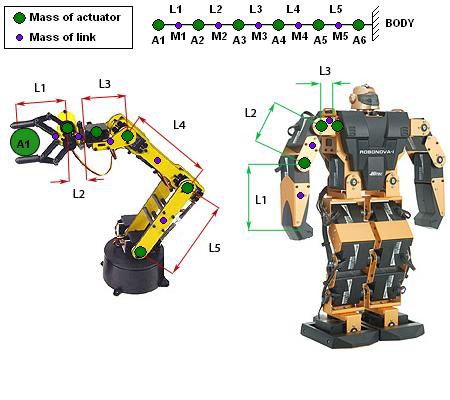
- L : longueur d'un pivot à un autre.
- M : masse de la liaison
- A : masse de l'actionneur (servomoteur ou autre). Remarque : mêmes unités que pour les masses de liaison.
- A1 : peut représenter la charge à soulever.
 Calculateur de couple de bras robotique
Calculateur de couple de bras robotiqueUtilisez l'image ci-dessus pour vous aider à déterminer quel couple correspond à chaque articulation. Notez que la numérotation débute à l'extrémité du bras, ainsi le couple final est celui qui soulève le bras entier (en débutant à A1 vous obtenez la charge que vous souhaitez déplacer à la portée maximale.). Le couple présenté est le COUPLE DE DÉCROCHAGE que vous pouvez utiliser pour votre recherche.
| L: | [cm] | M: | [kg] | A: | [kg] | T: | [kg cm] |
| L1: | M1: | A1: | T1: | ||||
| L2: | M2: | A2: | T2: | ||||
| L3: | M3: | A3: | T3: | ||||
| L4: | M4: | A4: | T4: | ||||
| L5: | M5: | A5: | T5: | ||||
| L6: | M6: | A6: | T6: |
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!