

Strange, some Google videos are down. Link to the one down now when writing this, here.
Update:
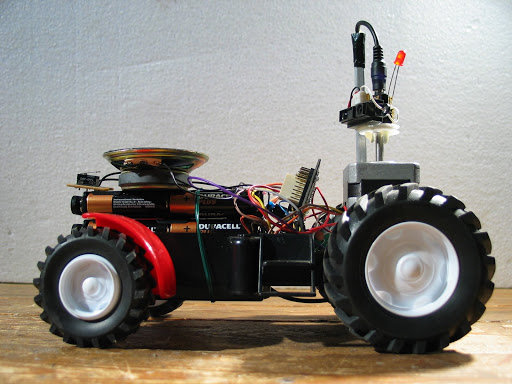
So I thought; With 360 degrees overview, I am unbeatable, I can navigate anything. I took an old toy-tractor and in amazingly short time got everything fitted onto it. That tractor was made for this, I thought.
I knew that it would be crap at steering, as the wheels where big, and the rear wheels (or front sometimes, this is 360!) where locked to each other, giving no differential steering, and slow turns.
But after a short while I got really tired of it; It is turning not on a plate, but on a big football stadium! :)
So it is going to die now, 360bot will not be on a tractor. Still I thought it looked cool :D And so I took some snaps just before I now go back and tear it apart. Click on image for more images..
Update:
I wanted to transfer power and signals to the moving part. I tried all sorts of stuff, but did not relly manage. So in the end I just gave up and used a 3.5mm jack-stick. Simple and easy.. but only 3 lines open.. So i had to give up on my first thought of having several LED's spin around. The thought was that they should sort of draw a rotating "radar image": Closer objects would make LED's closer to the axle light up.
However, I really like the sound of it spinning, and I will make something up! Added new video with the jackstick-trick. The LED on it is simply using the Sharp signal directly - that is actually quite a nice hack in itself :) I will always add a LED on the sharps from now on, nice indicator!
For a long time I wanted to hook up a stepper motor, and finaly I got to it!
Wow, these are cool! I enter this as a robot because I simply have to make a robot with this. I do not have much time, but now I have told you all that I am going to make a robot with a stepper motor, and so I will have to find the time :)
So far just a Stepper motor hooked up!
- Actuators / output devices: 1 Stepper motor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/360bot-stepper-motors-are-cool



