I am not fluent in PICAXE, but I am intrigued in the simplicity and the one sensor. How do you know whether to adjust left or right when you go off line?
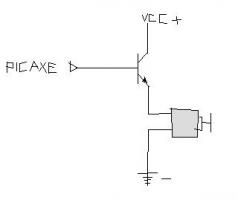
I don’t know if it matters but the normal way is to have the load (motor) on the collector side of the transistor. You should probably also have 1k resistor on the base to saturate the transistor. I would also recommend having a diode over the motor.
@arbarnhart: It seems that he is using two motors and two transistors and just running one of them to turn. (I might be wrong…)
Trying to interpret the code, it appears it will go straight only with a sensor reading of exactly 50. Higher, it adjusts one way, lower the other. Is the line a seam between a black panel and a white panel?