

Yahboom & Elephant Robotics: Jointly launch AI Robotic Arm!


Introducing the「JetCobot」7-DOF AI Visual Collaborative Robotic Arm

The emergence of the JetCobot will provide a powerful and flexible learning platform for students and researchers. Combining the two deep learning frameworks of TensorFlow and PyTorch, as well as YOLOv5 model training, we provide a comprehensive set of visual algorithm application solutions that are very suitable for education, programming, and development.
JetCobot is equipped with the myCobot280 7-DOF collaborative robotic arm and a high-definition camera clamping system. The hand, eye and arm are integrated to achieve a seamless integration of robotic arms, vision and control, and can accurately identify objects such as colors, faces, and human postures. By calculating the position of objects through geometric relationships, the robotic arm can complete precise positioning, grabbing, tracking and other actions.
Based on NVIDIA series development boards, it simplifies the complex motion control of a 7-DOF robotic arm through the ROS robot operating system and inverse kinematics algorithm, and can realize functions such as robotic arm coordinate control, motion planning, robotic arm collision detection, and gripping and sorting.

JetCobot is a 7 DOF collaborative robot developed for users' independent programming. It is small in size yet powerful in function, easy to operate, and safe for human interaction. The maximum effective arm span is 270mm (excluding clamping claws) and 374.5mm (including mold opening clamp). Claw), repeatable positioning accuracy ±0.5mm
What can owning it bring to you?
Through high-definition cameras, JetCobot can understand and respond to its surroundings, combining AI visual recognition and target tracking to achieve a series of complex and precise operations.
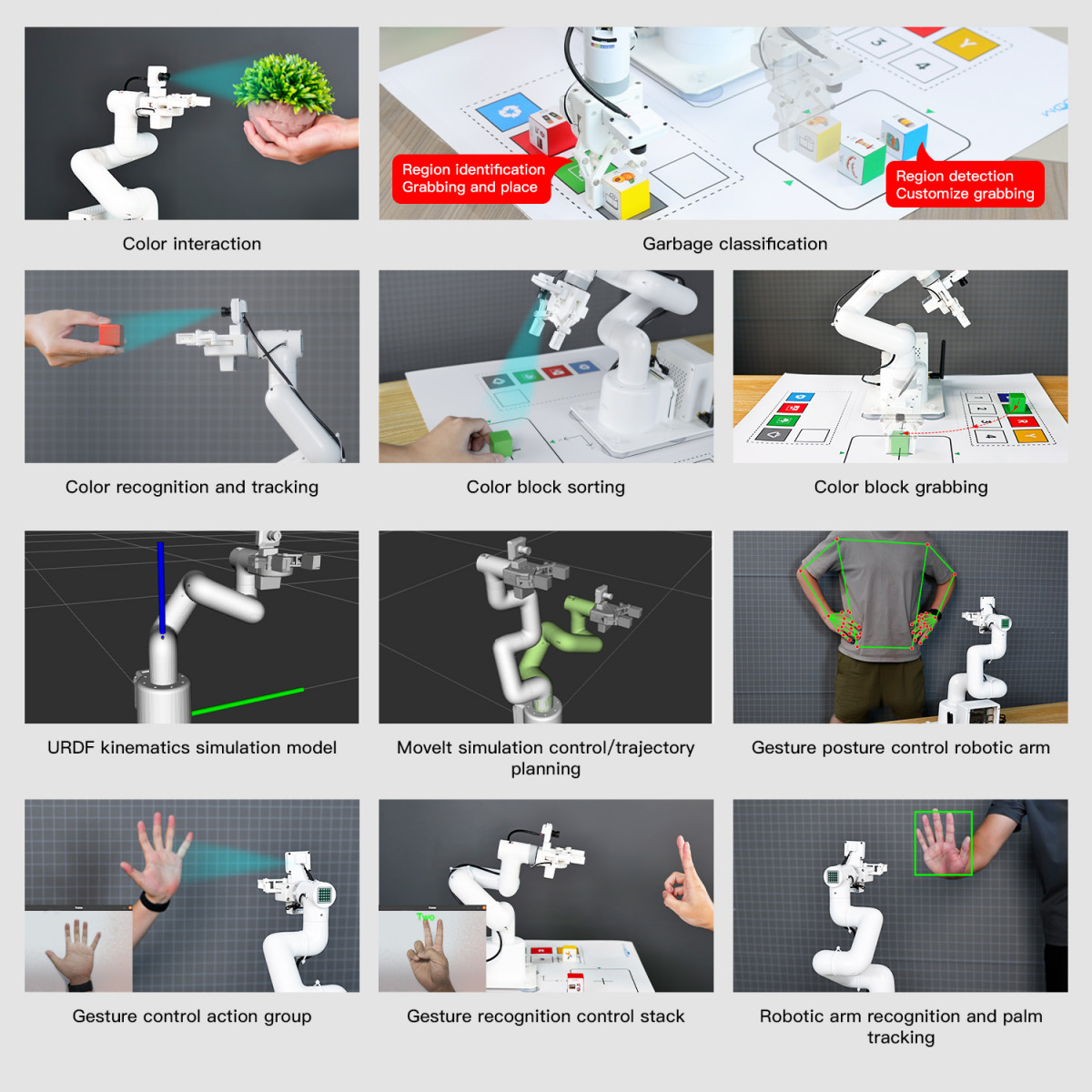
JetCobot integrates the MediaPipe machine learning framework, which not only can perform basic grasping and placing tasks, but also demonstrates high intelligence and adaptability in more complex scenarios;
It offers a robust and flexible platform for ROS education and research, significantly expanding the scope of robotics teaching and research.
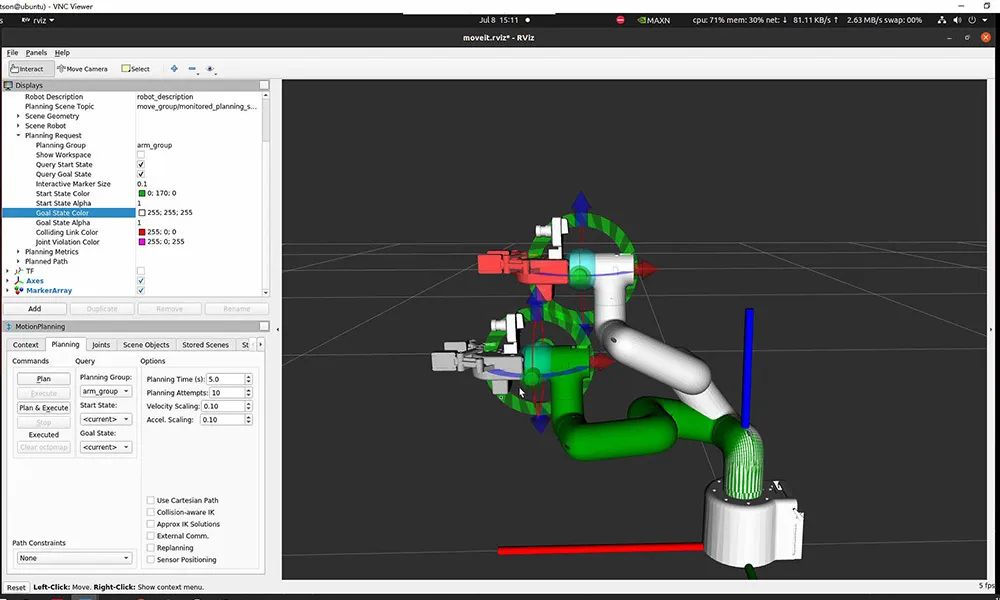
JetCobot supports Movelt simulation, which can perform mechanical control and algorithm verification in a virtual environment,reducing the requirements for the experimental environment and improving efficiency.
It allows users to conduct detailed planning and testing of the movement and task execution of the robotic arm before actual operation, detects whether the robotic arm collides with other objects in the environment during movement, and helps users avoid physical damage.
In summary, the JetCobot is an excellent choice for the fields of education, development, and research.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!