

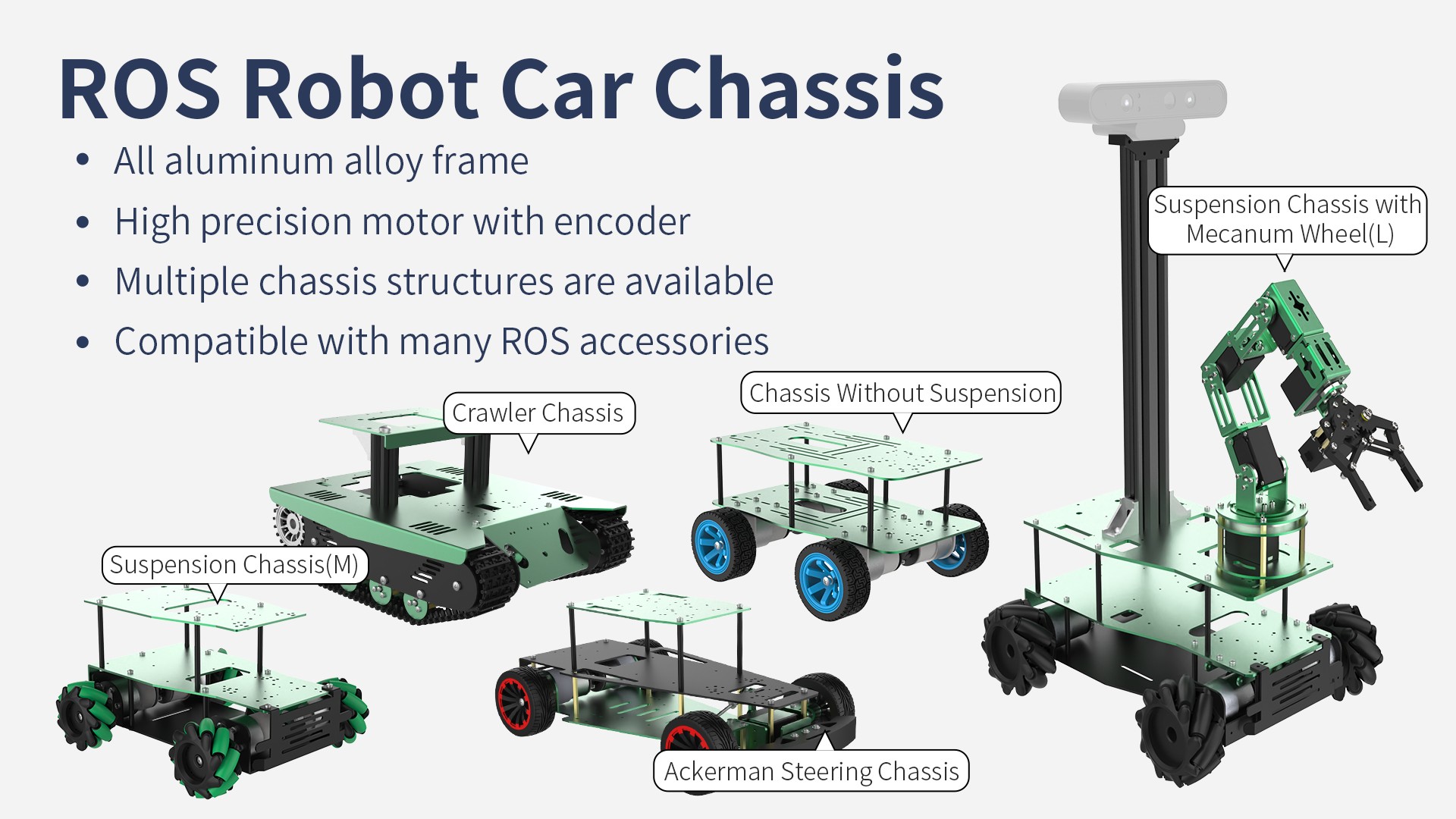
Do you know how to choose the right robot car model structure?

As we can often see, crawler tank robots can drive smoothly on rugged curves, soft grass and deserts, slippery ice and snow;
Narrow shelf aisles, omnidirectional robots car can move in all directions;
In the smart car competition, there are all kinds of four-wheel drive robots with many tricks.

Seeing this, have you ever wondered why a crawler robot can go off-road in the wild without any hindrance?
Why can an omnidirectional car move 360°?
Can a differential four-wheel drive vehicle replace the Ackerman structure robots?
Next, let’s explore them one by one!
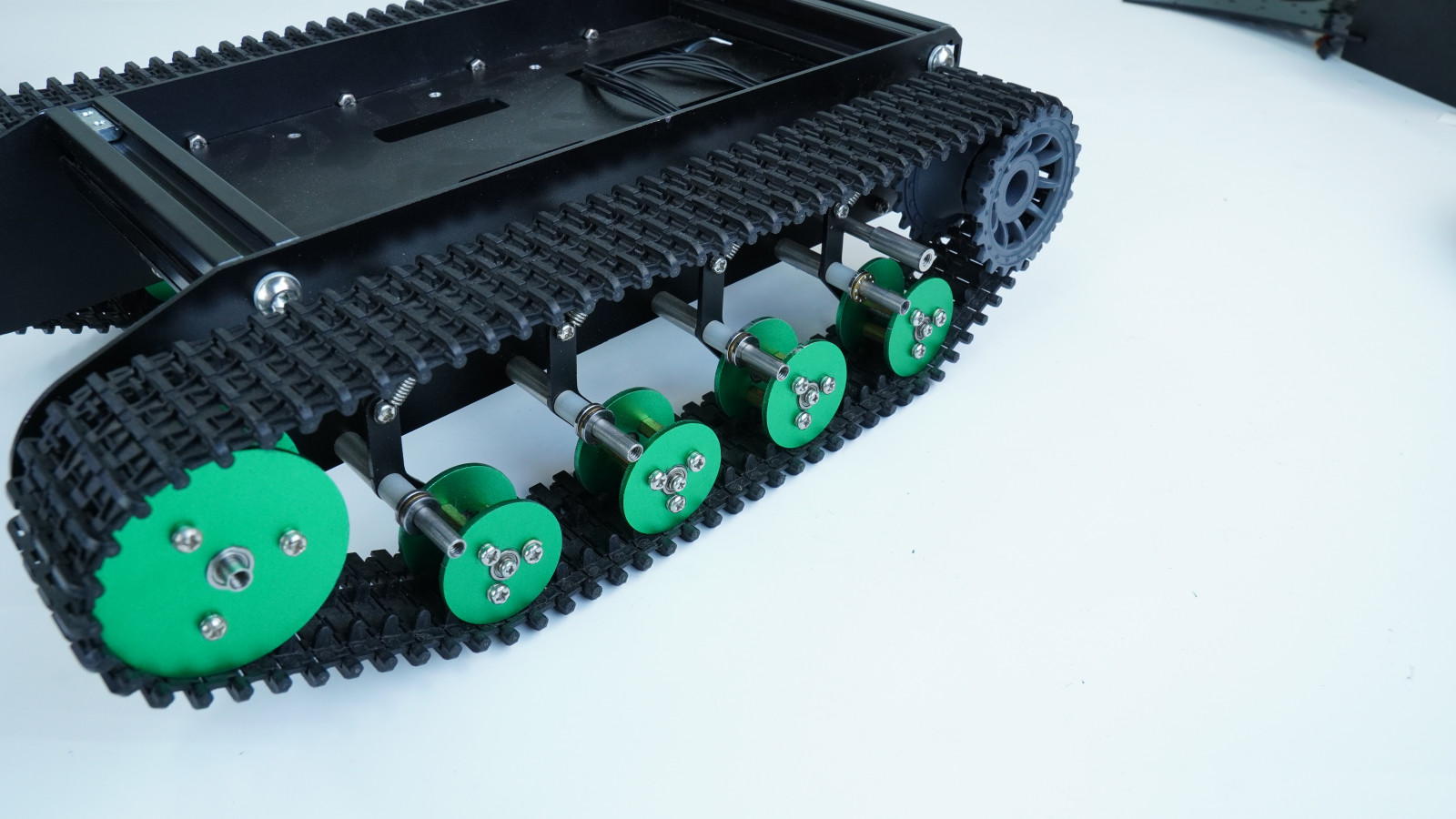
1.First--Crawler tank robot
Crawler tank robot often appears in various smart car competitions because of its unique and domineering shape. This design is not only domineering and beautiful, but also has a structure with low unit pressure on the ground, small subsidence, strong adhesion and strong driving ability, which is very suitable for driving in the wild on uneven ground and soft soil.
There are holes at both ends of the track, which mesh with the driving wheel. There is an induction tooth in the middle, which is used to straighten the track and prevent the track from falling off when the track vehicle turns or tilts. There are reinforced anti-skid ribs (referred to as patterns) on the side in contact with the ground to improve the firmness of the track shoe and the adhesion of the track to the ground.
Compared with the wheeled structure, the crawler structure has stronger terrain adaptability, and the vehicle body can carry heavier objects. According to the principle of pressure calculation, the tracked structure has a large ground contact area, and the pressure generated by the vehicle's weight can be effectively distributed to a larger area, so the unit pressure becomes smaller, making it easier to pass through areas with poor road conditions or rugged terrain.
However, compared with wheeled robots, crawler robots have a large contact area, are bulky, difficult to control, have a slow walking speed, a complex structure, and are relatively expensive.
2.Second--Mecanum wheel robot car/Rubber wheel robot car
Long ago, people felt that the steering of traditional vehicles was very inconvenient to use in certain environments. For example, in narrow and sharp curves, it was very difficult for Ackerman or differential four-wheel drive robot cars to complete perfect steering.
If we can find a way to allow the robot car to translate and rotate at any angle without turning the body, this problem can be perfectly solved.
So the Mecanum wheel, which can move in all directions, was invented!
Mecanum wheels can achieve omnidirectional movement at all angles.
Notice: Although the Mecanum wheel robot car is more flexible than the rubber wheel robot car, it still cannot completely replace the wheeled robot car.
Mecanum wheels are more complex than ordinary wheels, expensive and difficult to maintain, and have a shorter service life than rubber tires.
Some wheeled vehicles only need one or two motors to fully drive, while small vehicles with Mecanum wheel structures need four motors to drive them separately; and they need to be used on flat ground, because the position where the Mecanum wheel contacts the ground changes not only in the rolling direction of the main wheel, but also in the direction of the wheel axle. If the contacting ground is not parallel to the wheel axle, it will be very bumpy.
3.Third--Ackerman steering robot car/Four-wheel drive robot car
Ackermann steering is the standard structure of modern cars. The front two wheels are steered through the control of the servo, and the rear two wheels are used to control the speed. This steering structure can ensure that the centers of the turning radii of the four wheels intersect at one point. All four wheels are in a pure rolling state, which can control the turning angle and avoid obstacles easily and flexibly.
In contrast, the four-wheel drive robot car is the first choice of many people in the smart competition because of its simple structure, economical price and powerful four-wheel drive.
The four-wheel drive robot car adjusts the turning by the differential speed of the left and right wheels. The tires are greatly worn during the turning process, and the turning angle is difficult to control accurately. Therefore, the four-wheel drive robot car is still unable to replace the modern Ackerman car structure.
Summary:
Different robot car structures have different advantages and environmental adaptability.
Crawler robot car is suitable for climbing and off-road in complex terrain.
Mecanum wheel robot car can move flexibly in all directions.
Ackerman robot car is a standard structure for modern cars. It can be easily steered and is a good model for autonomous driving research.
Four-wheel drive robot car is economical and powerful.
Have you learned it?
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!