

Lynxmotion's 3DoF Robotic Arm & Accessories


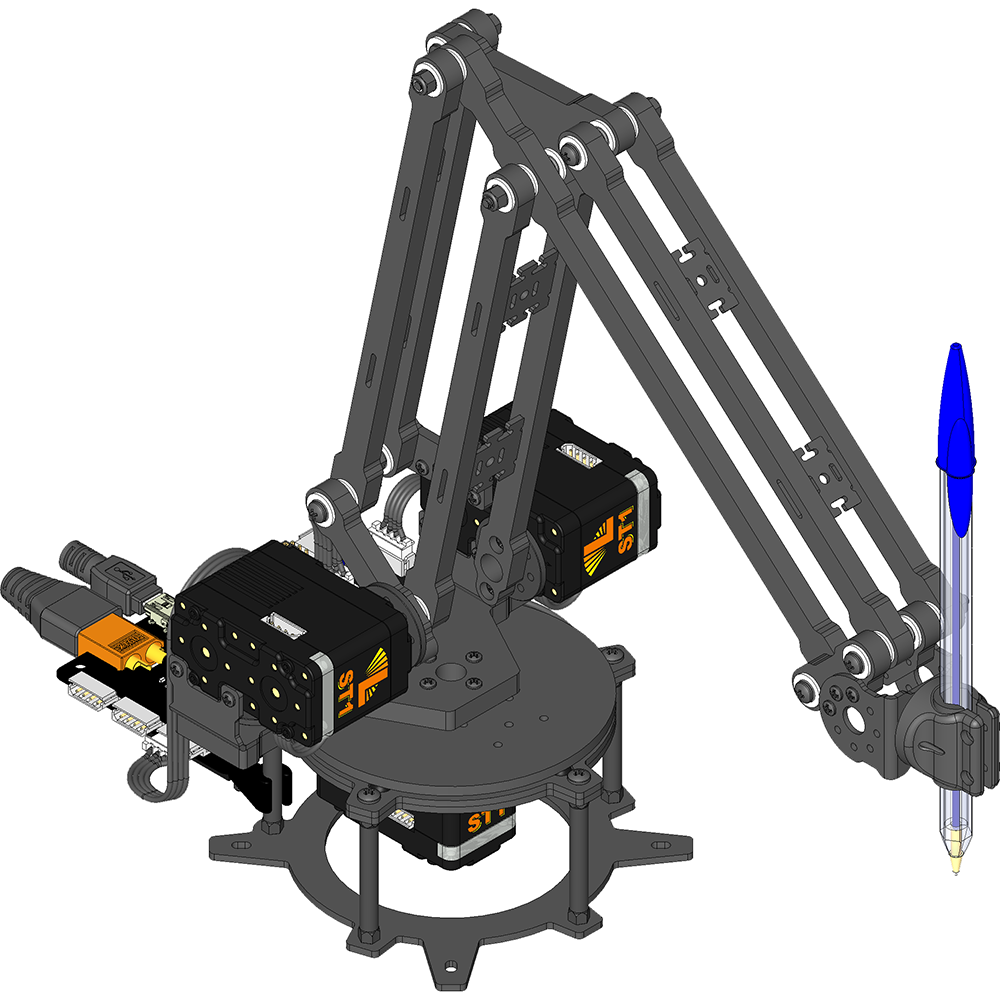
The new Lynxmotion three degree of freedom (3DoF) robotic arm uses the principle of two interlinked four bar mechanisms to keep the end effector at a fixed angle with respect to the ground. Although this arm does not have the same range of motion as the articulated four degree of freedom Lynxmotion arm, it is still very capable and full of interesting features, and priced to make it a very affordable option when getting into robotics.

Applications
Most people are aware that one of the first, most widespread applications of robotics was in industrial automation, which revolutionized the manufacturing sector (a good example would be automotive assembly lines). So what can a desktop robotic arm be used for?
Education
- Teach, learn or train using a physical platform to program and control motion
- Learn about the basics of robotics and process / industrial automation
- Nurture or forster interest in STEM / STEAM and robotics
- .. and more
Hobby / Development
- Experiment and customize by adding sensors, changing end-effector
- Work with “smart” servos and modify configurations, motion parameters
- Multi-DoF movement for use in artistic projects, displays, testing
- .. and more
Smart Servos
Lynxmotion was a pioneer in hobby robotics, developing tabletop robotic arms and legged robots using RC servo motors. Lynxmotion has evolved and the next generation of robots include the new Lynxmotion Smart Servo (LSS) motors. Each of the three main joints of the 3DoF arm use these smart servo motors, which are “smart” because they incorporate a variety of built-in sensors / feedback and, unlike RC servos, are highly user configurable. These modular servos form the basis of the Lynxmotion Servo Erector Set (SES) V2 system and can be used to easily create other robotic assemblies.
Have you thought about what it takes to control a robotic arm, but hesitated when you saw the complex communication protocol and setup required? The Lynxmotion Smart Servo communication protocol is intended to be human readable, making it easy to communicate with the arm in almost any programming language.

Each servo includes quite a lot of features and functionality, including:
- Feedback (abs. and virtual position, angular velocity, voltage, current, temperature...)
- Built-in safety features (over-current, over-temp, voltage)
- User configurable (angular range, zero, stiffness, motion & more.)
- Easy to understand, “human readable” serial communication protocol
- LED for effects and error feedback
- Machined aluminum case, all-metal gears
- Button menu
Mechanics
The 3DoF arm was intended to be a lightweight, inexpensive yet versatile robotic arm. Its structure is comprised of the following main elements:
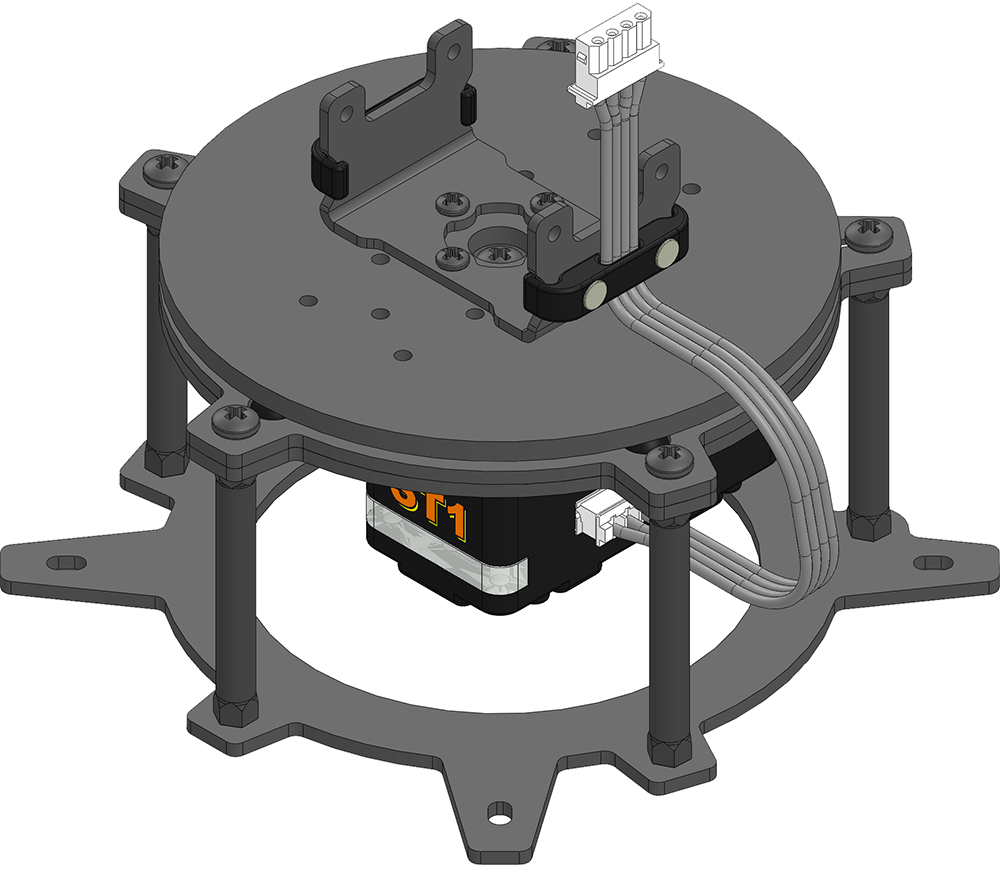
Base
The LSS base is used for both the articulated 4DoF arm and the 3DoF arm. It is made of rigid G10 composite plates and retains the general geometry and mounting pattern of the AL5 series injection molded plastic BR-KT base used in the Al5 series of arms. Unlike the BR-KT base however, new clips have been created to be able to connect (and easily remove) electronics to the vertical aluminum standoffs.
Links
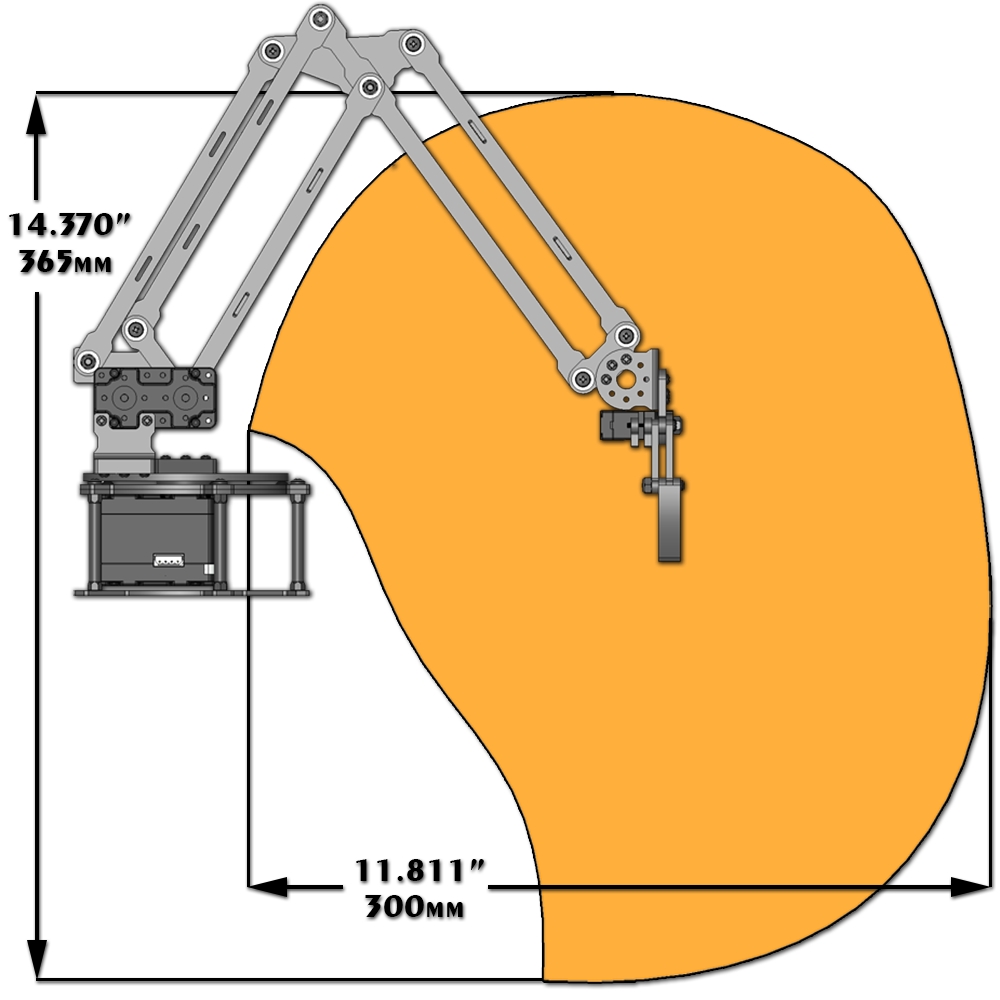
The SES V2 bracket system, at least with the current selection of products, would not have allowed for a small nor lightweight double four-bar system. As such, the links are made using rigid G10 composite and all points of rotation are supported by metal ball bearings. The range of motion given these mechanics is more limited than that of an articulated arm; for example, the maximum horizontal reach is quite different from its vertical reach. Nevertheless, the design has its advantages, offloading the weight of the elbow servo to the base, and removing the need for a separate servo in the wrist to maintain the end effector at a desired angle.
Gripper
The 3DoF arm includes an RC servo driven parallel gripper mounted to a custom metal bracket. The bracket retains the SES mounting pattern so SES V1 and SES V2 brackets and accessories can be easily mounted vertically, horizontally or at a 45 degree angle depending on the user’s application.

Electronics
The 3DoF arm includes three main electronic modules:
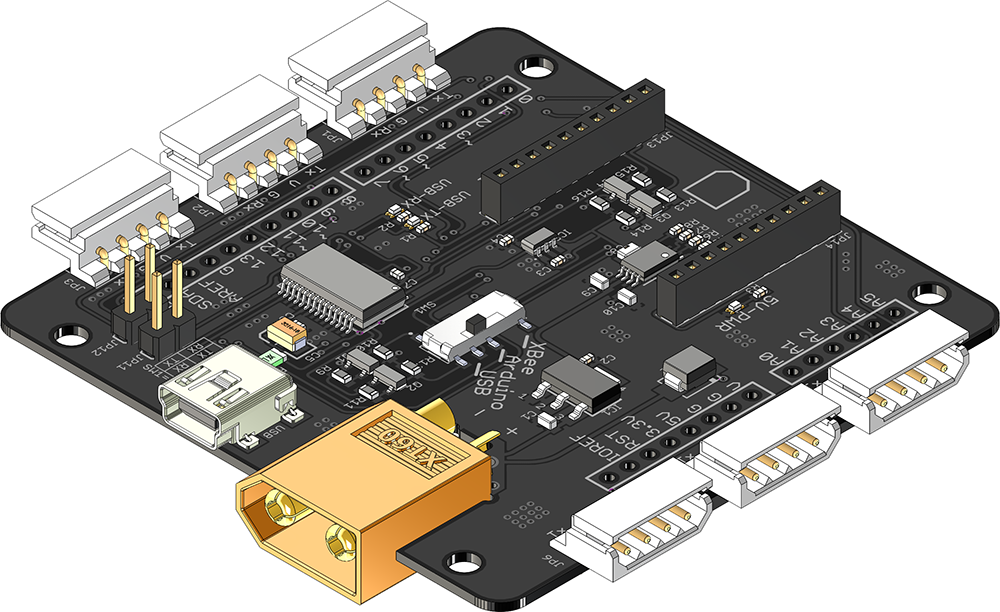
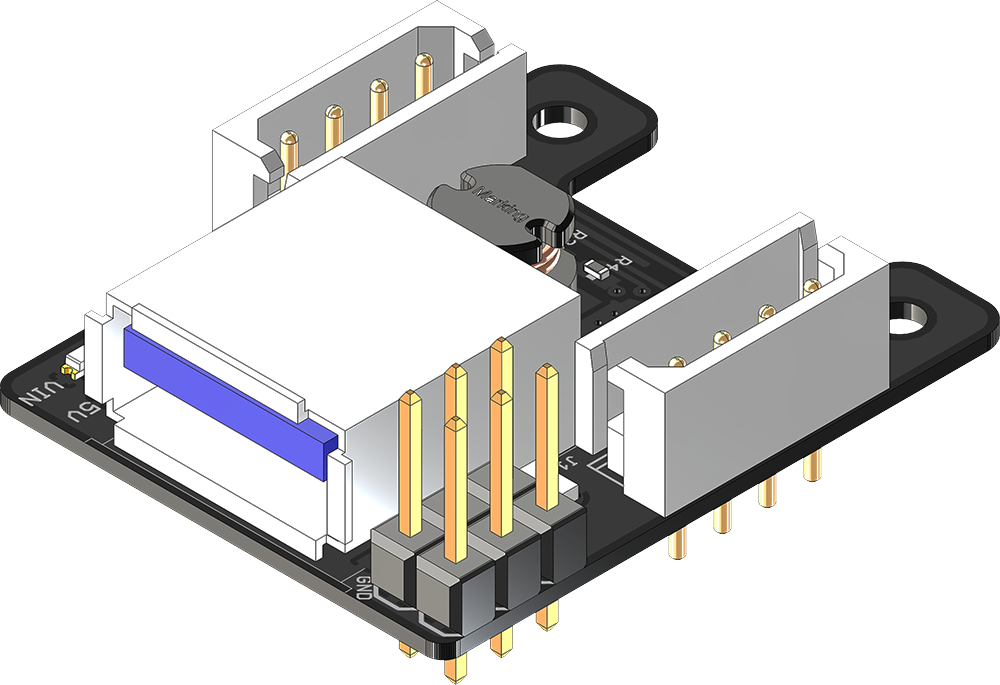
LSS Adapter
The LSS Adapter module provides the main power and signal distribution to all servos on the bus. It was designed with several features:
- Onboard Bee Socket (for XBee, Bluetooth Bee WiFi Bee modules)
- Arduino shield compatible using stacking headers
- Three selectable control method: USB, Arduino or XBee
- Raspberry Pi mounting hole compatibility
- Automatic logic power selection (USB / External)
- Power from the Lynxmotion wall adapter (included with the arm) or a 3S LiPo battery
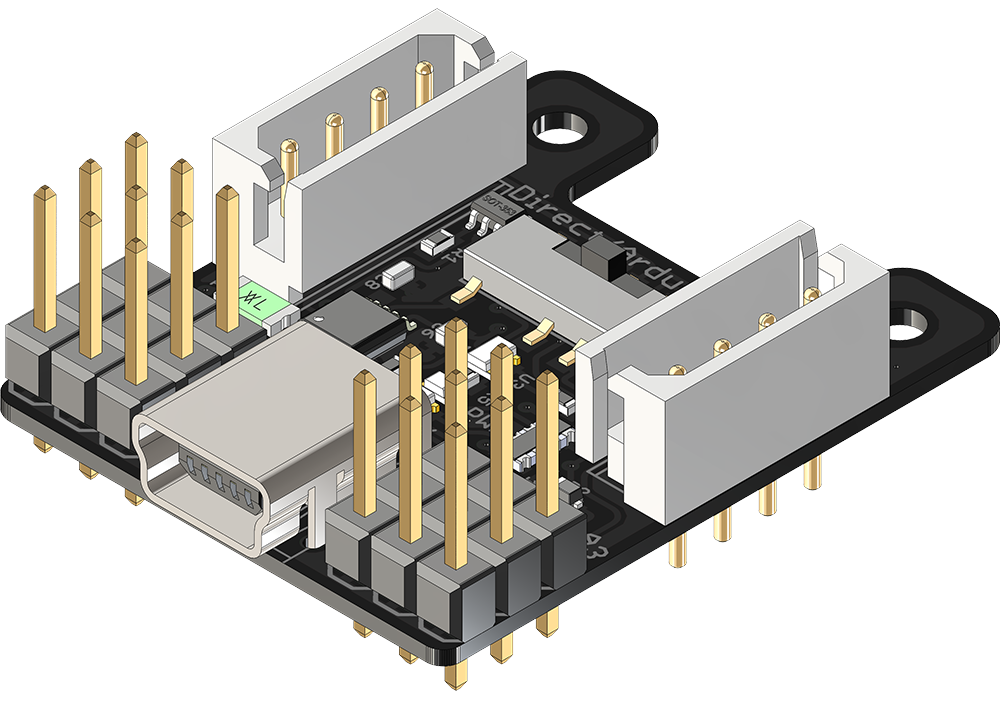
LSS 2IO
The LSS 2IO is a very small microcontroller breakout module which is fully programmable via the Arduino IDE. The board’s default code (“LSS-2RC”) allows it to accept a selection of the LSS Communication Protocol to control up to three RC servo motors connected to its pins. Code can be created to have it behave as a “master” or a “slave”. Easily connect digital, analog or I2C sensors to the additional three pins.
LSS-5VR
The LSS-5VR takes input from the LSS bus and outputs 5V. The intention is to power secondary electronics like a Raspberry Pi (or other SBC) at a regulated 5V since they cannot accept 12V power directly. In this case, the LSS-5VR powers the RC servo in the gripper.
Control
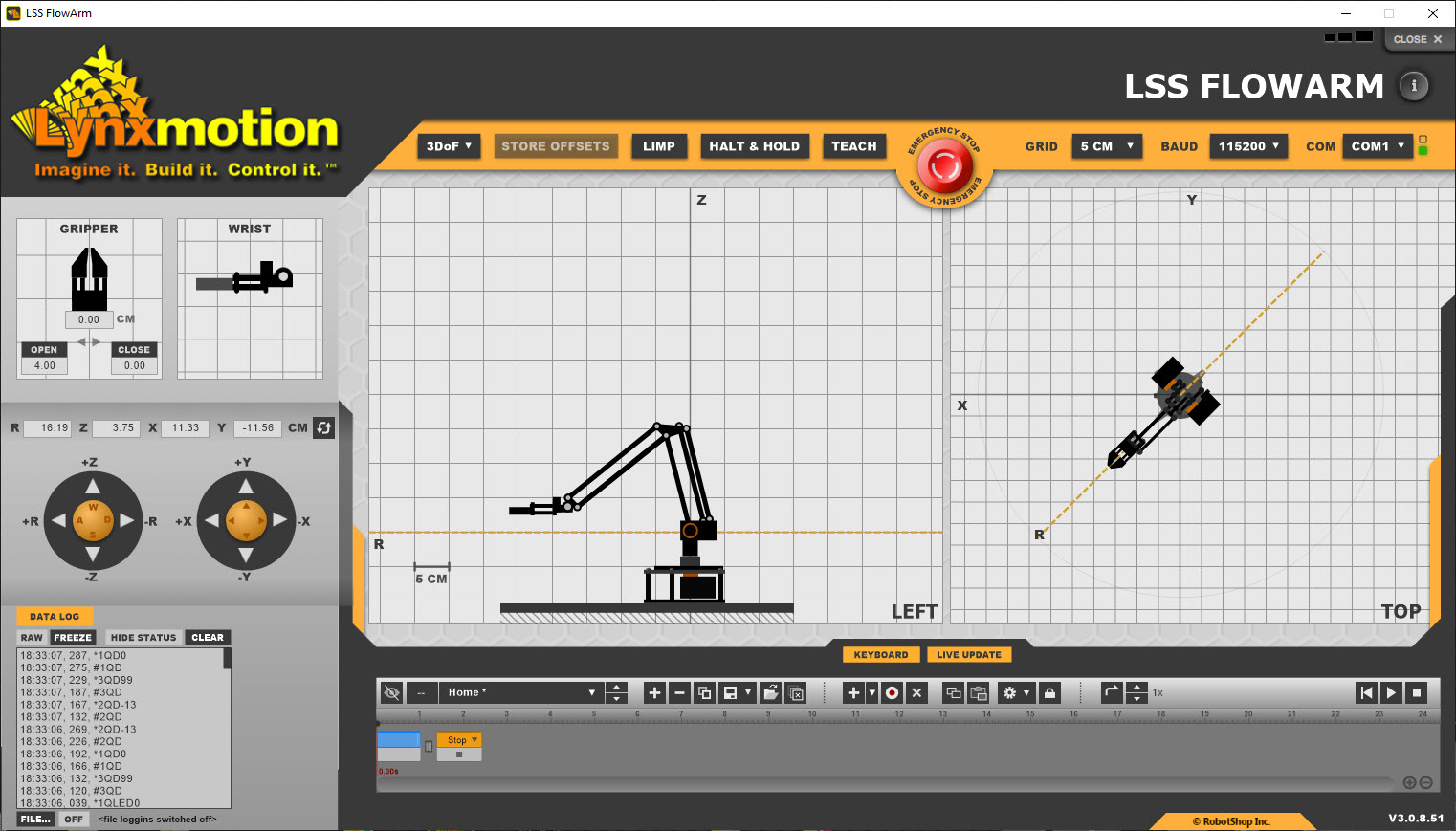
LSS FlowArm
- LSS FlowArm is a free software which gives beginners a graphical / visual interface with which to operate the arm and create motion sequences.
- Control the position of the arm via the on-screen visual representation of the arm, inputting cartesian coordinates or using keyboard commands.
- User-generated frame-by-frame motion sequences
- Teach mode for the base, shoulder and elbow servos. Unlike most hobby robotic arms on the market, the smart servos include a built-in position sensor, allowing the user to physically move the arm and record positions, effectively “teaching” the arm where to go with no programming required.
- Data log to view and save commands sent to the arm for use in other programs
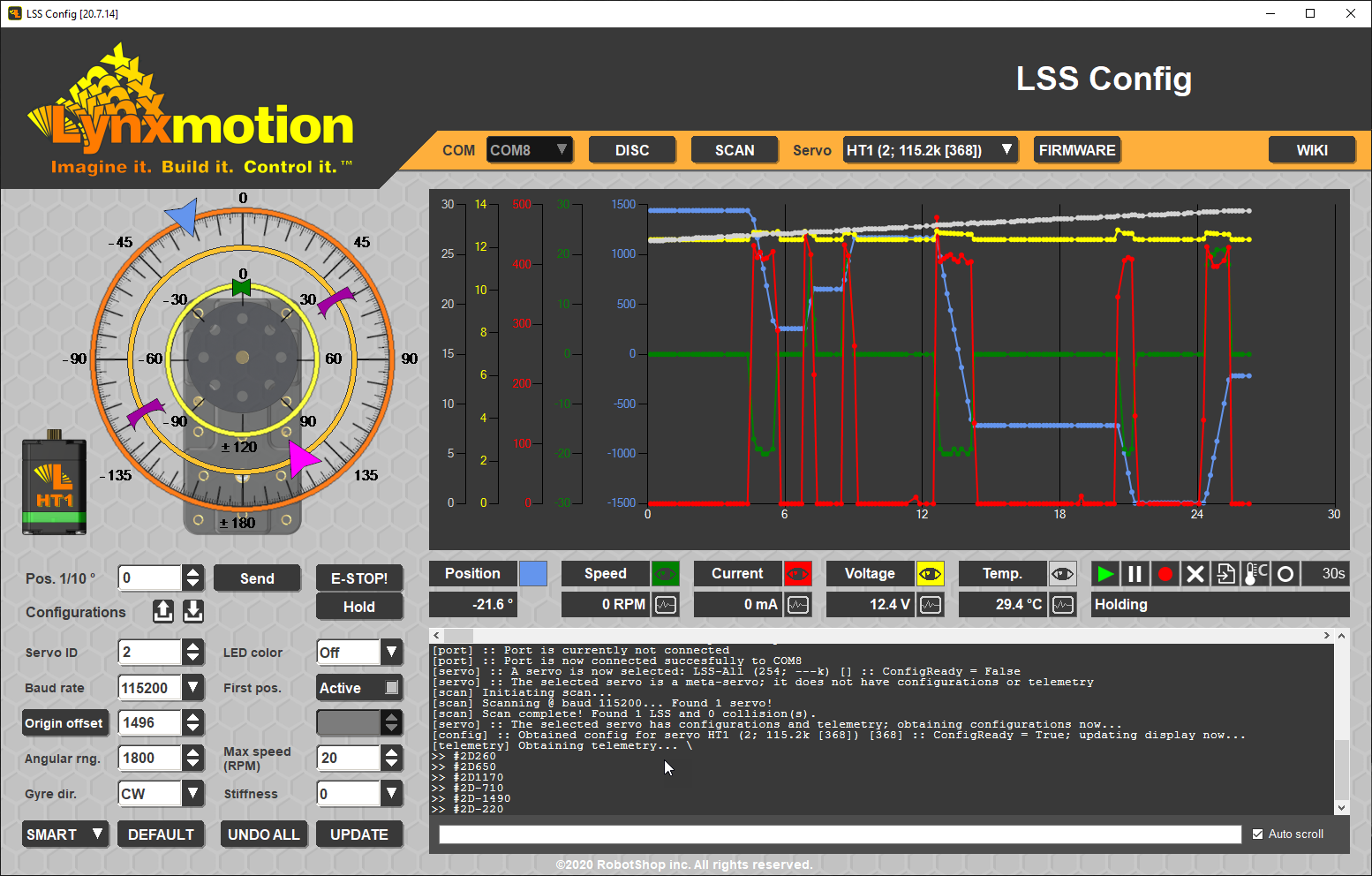
LSS Config
The LSS Config software allows the servos to be easily moved and configured and although configuring the servos is meant to be straightforward using any common programming language, the LSS Config is a fast and foolproof method to do so one servo at a time. The interface includes a section with more common configurations, a visual representation of several angular configurations, a graphical area showing the output from sensors, as well as a command line interface. The interface is also used in the event of a firmware update for one or multiple servos.
Libraries
If you are interested in creating your own code to operate the arm, the LSS Communication Protocol is human readable and designed to be as easy to learn and implement as possible. In addition to this, libraries have been created which can be expanded by the user and more easily integrated into existing projects.
Accessories
Choosing a Lynxmotion arm means you can more easily add accessories for your application. Some of the more popular accessories for the 3DoF arm include:
Lynxmotion Conveyor System & Accessories
Robot arms are perfect for automation, so the natural accessory for a tabletop arm is a tabletop conveyor. The Lynxmotion HD Conveyor uses rigid aluminum extrusions, a solid modular track and an LSS HT1 servo for motion. There are a variety of accessories for the conveyor which are easily attached to the frame to allow for experimentation with a variety of sensors, including a camera, distance and limit sensing and more. Optional decks allow arms and payload area to be attached to the conveyor to create a rigid and easily moved single structure.


Servo Erector Set (SES) compatible
The Lynxmotion Servo Erector Set helps users easily change mechanics and electronics. Although the 3DoF links are not modular, the end effector / gripper bracket incorporates the SES mounting pattern, allowing SES compatible brackets to be easily connected. Change the gripper to the LG-KT or vacuum, add a degree of freedom for wrist rotation or tilt, or a C-bracket for customized applications.
Additional Degrees of Freedom
Since the wrist bracket incorporates the SES mounting pattern, additional RC (SES v1) or smart (SES v2) servos and brackets can be added to increase the number of degrees of freedom in the arm. For example, add an inexpensive Hitec 422HB RC servo and standard multipurpose bracket to rotate the object to a desired angle.

Integrate sensors / LSS-2IO
The Arduino-compatible LSS-2IO is effectively a small programmable board with digital, analog and I2C pins broken out. It can be programmed to control up to three RC servos, and communicate with external sensors, relays and more.
CAD files
Can’t find the part you need, or want to include the arm in a CAD drawing or assembly? The mechanical design files are available, allowing you to design and create custom parts such as 3D printed accessories, custom mounting brackets and more. Everything is available on the Wiki.
Vacuum Upgrade
The SES V2 vacuum upgrade can replace the default parallel gripper provided with the 3DoF arm. It includes a DC driven vacuum pump, the LSS-2MC motor controller and corresponding mechanics.
Comparison
|
AL5A + BotBoarduino |
AL5A + SSC-32U |
AL5D + BotBoarduino |
AL5D + SSC-32U |
3DoF |
4DoF |
5DoF | |
|---|---|---|---|---|---|---|---|
| SKU | RB-Lyn-1061 | {Coming Soon} | |||||
|
Max Reach (cm / in) Horizontal |
29 / 11.4 |
29 / 11.4 |
42 / 16.5 |
42 / 16.5 |
38 / 15 |
40 / 15.8 |
{Coming Soon} |
|
Max Reach (cm / in) Vertical |
14 / 35.5 |
14 / 35.5 |
48 / 19 |
48 / 19 |
21 / 8.2 |
50 / 19.8 |
{Coming soon} |
|
Max Payload |
~4oz / 100g | ~4oz / 100g | ~10oz / 275g |
~10oz / 275g |
{Coming Soon} |
{Coming Soon} |
{Coming Soon} |
|
Degrees of Freedom |
4 + gripper |
4 + gripper |
4 + gripper |
4 + gripper |
3 + gripper |
4 + gripper |
5 + gripper |
|
DoF Upgrade Kit?* |
Wrist (3 options) End-Effector |
Wrist (3 options) End-Effector |
Wrist (3 options) End-Effector |
Wrist (3 options) End-Effector |
Wrist End-Effector |
Wrist |
None |
|
Actuator Technology |
Hobby RC |
Hobby RC |
Hobby RC |
Hobby RC |
Smart Servo + Hobby RC |
Smart Servo |
Smart Servo |
|
Actuators |
Hitec HS- |
Hitec HS- |
Hitec HS- |
Hitec HS- |
|||
|
Series |
SES v1 |
SES v1 |
SES v1 |
SES v1 |
SES v2 |
SES v2 |
SES v2 |
|
Included Gripper |
Parallel |
Parallel |
Parallel |
Parallel |
4-Bar Parallel |
Angular |
Angular |
|
Electronics |
SSC-32U | BotBoarduino | SSC-32U |
LSS-2IO + |
|||
|
Software |
Arduino |
FlowArm PLTW SSC Sequencer |
Arduino |
FlowArm PLTW SSC Sequencer |
LSS FlowArm |
LSS FlowArm |
LSS FlowArm |
* Note that since the arms are all part of the Lynxmotion Servo Erector Set (SES), additional SES parts can be added easily, though no specific instructions are provided. For example, RB-Lyn-814 (AL5D-PLTW) includes a medium duty wrist rotate upgrade. Not sure if the Lynxmotion 3DoF robotic arm is right for you, or might have questions? Create a new topic on the RobotShop Community here, or contact Lynxmotion directly through RobotShop's Support Center.
More information including assemly and user guides can be found on the Lynxmotion Wiki.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!