

A new generation of large-scale AI robot makes its dazzling debut!


The ROSMASTER M1, newly developed by Yahboom , is an omnidirectional mobile embodied intelligent robot designed for robotics education, ROS research, and AI multimodal interaction experiments. It employs a Mecanum wheel chassis structure, supporting precise omnidirectional motion and enabling complex trajectory control such as lateral movement, diagonal movement, and stationary positioning , providing an excellent experimental platform for path planning and motion control algorithm research.
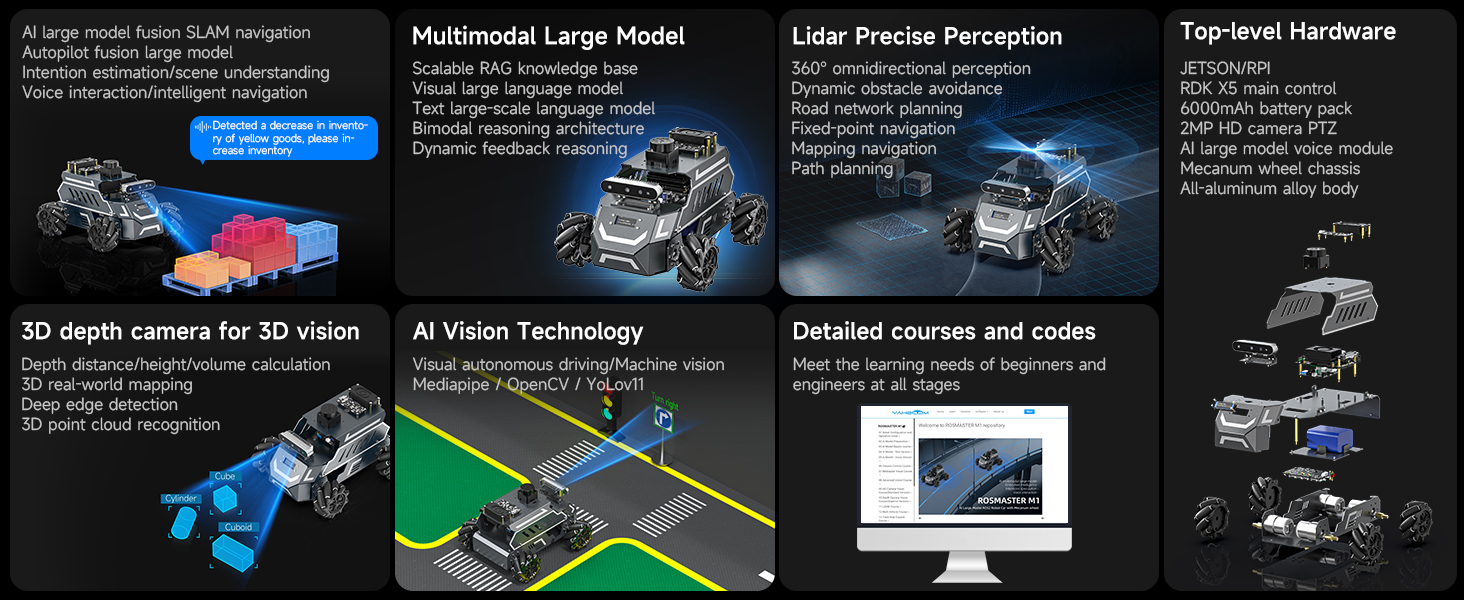
The ROSMASTER M1 can be equipped with a variety of peripherals, including a 3D depth camera/2MP HD gimbal camera (optional), LiDAR, AI voice module, and ROS robot expansion board, building human-like 3D visual perception and environmental understanding capabilities. It supports Raspberry Pi 5, RDK X5, Jetson Nano 4GB, and Jetson Orin Nano 8G, and is fully compatible with ROS2 HUMBLE, allowing for deep integration with mainstream AI frameworks. The ROSMASTER M1 employs an innovative multimodal dual-model collaborative reasoning architecture, efficiently integrating visual, voice, and text information to achieve human-like capabilities such as continuous dialogue, instant interruption, dynamic scene reasoning, and intent inference. PTZ(optional),LiDAR, AI voice module, and ROS robot expansion board, building human-level 3D visual perception and environmental understanding capabilities. It supports Raspberry Pi 5, RDK X5, Jetson Nano 4GB, and Jetson Orin Nano 8G, and is fully compatible with ROS2 HUMBLE, deeply integrating with mainstream AI frameworks. Employing an innovative multimodal dual-model collaborative reasoning architecture, it efficiently integrates visual, voice, and text information, possessing human-like capabilities such as continuous dialogue, instant interruption, dynamic scene reasoning, and intentions speculation.
feature:
Mecanum omnidirectional drive chassis, high-torque 520 encoder motor
The ROSMASTER M1 employs a high-performance four-wheel Mecanum wheel structure, enabling omnidirectional movements such as lateral movement, diagonal movement, circular rotation, and precise edge following. It perfectly meets the teaching and research needs of robot path planning, omnidirectional obstacle avoidance, and motion control algorithms, providing a powerful motion foundation for high - difficulty mobile robot experiments .
Supports multiple platforms, meeting the needs of beginners to researchers.
It supports multiple computing platforms, including Raspberry Pi 5, RDK X5, Jetson Nano 4GB, and Jetson Orin Nano 8G. Compatible with ROS2 HUMBLE, it can meet diverse needs such as school teaching, laboratory work, and artificial intelligence research, providing users with extremely high scalability and sustainability.
Multi- sensor fusion to build human-like 3D perception
This system, equipped with a 3D depth camera, a 2MP high-definition PTZ camera , LiDAR , an AI voice module, and other peripherals, forms a multimodal environmental perception system, supporting advanced applications such as visual recognition, SLAM mapping , and environmental understanding.
Multimodal humanoid interaction with outstanding artificial intelligence capabilities
It employs an innovative multimodal dual-model collaborative reasoning architecture, deeply integrating visual, speech, and text information. It possesses cutting-edge human-like interaction capabilities, including continuous dialogue, real-time interruption, dynamic scene reasoning, and intent inference.
Highly scalable for research purposes, Meeting diverse experimental needs
Suitable for various advanced scenarios such as SLAM navigation, AI visual recognition, path planning, multimodal interaction, and embodied intelligence research. Supports a wealth of ROS teaching examples and open-source resources, making it easy to use in classroom teaching and research projects.
- Why Choose the ROSMASTERM1 Robot?
- An Embodied Intelligence AI Educational Robot for ROS Developers.
Interesting Functions Introduction
Scene understanding
Through large visual model, M1 can understand the scene information within its field of view, recognize object names and spatial relationships, and respond in real time using voice large model.

Visual Tracking/Following
Leveraging the powerful analytical capabilities of a large visual model, the M1 can automatically identify and lock onto target objects in complex environments, tracking them by camera PTZ system or intelligently following them by robot car.

Autonomous cruising
Through deep analysis of the large visual model, M1 can accurately identify and track lines of different colors in real time.

Deep distance Q&A [Only for Superior Kit]
By combining the large visual model and the depth camera, M1 possesses environmental understanding and distance perception capabilities, combining visual recognition with distance data for intelligent Q&A.

SLAM mapping environment perception
Through large visual model analysis, the M1 can deeply understand the objects and spatial layout within different areas of the map.

SLAM intelligent multi-point navigation
M1 can transmit environmental data to the visual large model in real time for in-depth analysis, and plan dynamic paths based on different user voice commands, autonomously navigate to single or multiple designated areas, thereby achieving intelligent navigation.

SLAM map object search
Through voice large model inference and visual large model analysis, M1 can accurately recognize and analyze user voice commands, deeply understand the meaning of the commands, and autonomously plan and complete the corresponding tasks.

Embodied Intelligence for complex and long-term task processing
By integrating visual understanding, voice intent recognition, and SLAM dynamic path planning, M1 can decompose complex user commands, perceive environmental changes in real time, and complete a series of coherent operations including recognition, tracking, navigation, and Q&A.

Large model intention understanding planning | Context-aware response
By expanding the RAG knowledge base to realize user intention recognition and environmental context analysis, the robot can understand the user's potential needs, independently plan tasks and respond dynamically without issuing detailed instructions.

Get Started with Yahboom Tutorials
Conclusion
Yahboom ROSMASTER M1 not only continues the mature application of traditional robots within the ROS ecosystem, but also achieves significant functional expansion.
It not only supports large-scale model interaction functions, but also integrates autonomous driving functions.
The innovative integration of large-scale artificial intelligence models with traditional autonomous driving systems and ROS2 road network planning significantly enhances the robot's intelligence level.
The M1 uses an omnidirectional Mecanum wheel chassis, which has excellent flexibility and responsiveness, making it suitable for a variety of application scenarios, such as university laboratory teaching, autonomous driving algorithm verification, and large-scale model application development.
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!