The idea in short:
I will send a robot around planet earth. The robot will be sent to you free of charge. Let it run in your area for 24h and show all earthlings your projects or a piece of your country. Send the rover to the next destination after your mission is over (postal charges will be refunded).
The robot can be controlled through a web interface while transmitting a live video stream. All young scientist and of course all discoverers that are young at heart get free access to the robots, there is even no registration needed.
Try existing robots in my RoboSpatium to see how it works:
www.RoboSpatium.de
To set my robot free, I need your participation:
First of all I am looking for groups that would like to prepare a mission for a day. You must feed the robot with electricity (charge the batteries) and provide internet access (WLAN hotspot).
Furthermore, some feedback about the robot to be build would be nice. Give it a name, paint it or make suggests for the design, additional sensors or what ever you think would make the project more exciting.
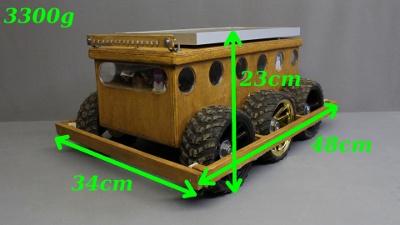
I have build a prototype:
Details are available on my project page:
http://homofaciens.de/robospatium-crowdfunding2016-01_en_navion.htm
Any ideas for this project or do you have a mission target?
Thanks
:-)
Norbert
Remote controlled through web interface
- CPU: Raspberry Pi
- Operating system: Raspbian Linux
- Programming language: C, Perl, javascript, HTML
- Sensors / input devices: bumper switches, camera, ir camera
- Target environment: indoor and outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/would-you-like-to-invite-my-robot-to-visit-your-location-on-its-tour-around-the-globe
One more sensor could be a
One more sensor could be a GPS device, so people can see it’s coordinates. I’m worried about it coming to America. The world famous hitchhiking robot (Hitchbot) went to Philidephia and didn’t make it out alive. :^(
Emergency button
Yes, showing the location on a map would be a nice feature. It’s on the list:
http://homofaciens.de/technics-robots-R6-construction_en_navion.htm
Maybe adding a “911 emergency button” to the control center could help the robot making it’s way through territories of hostile alien species 
Interesting Concept!
As Jim_the_Hermit indicated, including a GPS module would be really nice. Given that it will be used by a variety of people, potentially some with no robotics background, making it robust (and also weatherproof) will likely be important. People may potentially try using it in areas which can easily damage the rover (edge of a cliff, deep snow etc. Size will still be really important for shipping fees, and just a guess - you’d likely not want a shipping company to simply leave it at someone’s doorstep?
Cool project, great idea!
Cool project, great idea!
A few ideas to add…
I would add a tilt-compensated compass that gives heading, pitch, roll. You can use it to have the robot drive straight on whatever heading it wants to, and detect if it is tilted (pitch, roll) too much and should stop, backup, etc. Combined with the GPS, you can use it to drive complex paths (series of waypoints).
I’d put some Sharp distance sensors under the front and back for cliff detection.
A bot this big could use a multi-directional sonar array and some obstacle avoidance, which is cheap and good at detecting people that walk up all the sudden unexpectedly.
I would happily donate code to help on any of these things (except for my GPS waypoint nav code, which is out of date and not working)
Easy to build/repair
is an important part of the robot concept. On the one hand, the chassis should be easy to copy and of course easy to repair. For the prototype I have chosen plywood, to get a quick result. Now I think this is also a good material for the world tour robot. It’s commonly available and repairings can be done easily. Furthermore it has good thermal protection capabilities. As you said, the rover might operate in ice and snow as well as in a dessert. Heating / cooling the robot is important. Test runs in rainy conditions, in mud and rough terrain must be done.
Yes the maximum size/weight is indeed ruled mainly by shipping costs. Besides reliability of the company, import/export rules have to be considered and customs clearance has to be done by the company.
Accelerometer / gyroscope
are already on the features list. Tilt warning must be implemented. Since I am sure, some of the rover operators (there is free access for anybody) will ignore that warning, thus it must become an automatic tilt protection
Same is for cliff detection. It won’t be an easy job to make it tilt proof, thus a robust design is the Alpha and Omega of the concept.
Collision prevention is also important for the robot - the collateral damage should be on a low level
It will be remote controlled, thus finding waypoints through GPS is not on top of the list.
If the new robot is on it’s wheels and sensor arrays are in place, some example code would be very nice. What kind of sensors are you using in your projects?
Sensors I use…
For obstacle detection and navigation, I use the following sensors:
I use HC-SRF04 Sonars - because they are cheap (a few bucks each) and I use 12 of them, so if I used something else it would really add up. They work well with my code for Force Field Algo and newping15 lib. If yu decide to do a sonar array setup, I’ll donate code.
I use Sharp IR Distance sensors for cliff detection.
I use the CMPS10 compass for detecting pitch, roll, and heading. Heading is particularly useful for driving in straight lines when needed as wheeled/tracked vehicles will tend to drive in curves It is also useful for making turns of a particular number of degrees or to a partcular heading. I couldn’t function without a good compass.
For GPS, I use a phone…it is ok. GPS in general is not that accurate, good outdoors for getting within 15 feet of where you want to be.
Thanks
I will have a closer look at the sensors you suggested.
R5 is online for the next 2h
The batteries are charged and you can drive R5 around my house:
http://www.homofaciens.de/robospatium-controlstation-R5_en_navion.htm
The battery power will last for around 2h in the evening hours here in Germany.
Drive it!



