

Long time ago I wanted to build a multi servo robot, like a biped or a hexapod. After seeing OddBot's Mini Biped robot, I wanted to build one just for fun until I could afford to get the number of servos required for a full robot. This is how Wobbly was born. He has 4 servos for the legs and one servo for panning a Sharp IR sensor. Needs a little bit more work until it will be able to walk and turn properly, but he's almost ready.
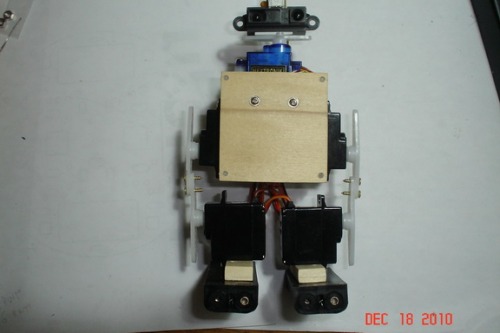
I have designed a 12 servo board just like the uBotino robot controller, but I am still waiting to arrive. Mean while, I started the work on the robot, since I had all the servos needed. I grabbed some scrap poplar plywood that I had from building MiniEric and quickly fitted 2 pieces to mount the hip servos, then I used 15mm plastic stand-offs to mount the neck servo and the servo board. 2 more pieces of plywood to mount the knee servos to the battery boxes and of course, 4 screws to mount the hip and knee servos together. Double sticky tape to mount the Sharp sensor as usual, and after a bit of soldering for the battery wires, the robot was ready for uploading the code.
See some pictures:


The easy part was done. Now comes the hard part. I have downloaded OddBot's code for the soccer robots and adapted it a bit to work with my setup. I still need to figure out how to steer the robot, but the forward-backward motion kind of works. I need to add some traction on the toes, otherwise the robot just skeeds in place. So, watch for a later update to see it in action.
Cheers!
Update Jan. 25th 2011:
After some more code tweaks, the robot kind of works how it's supposed to. Still way from being perfect, it proves the possibilities. At the moment, you can see it walking leaning a bit on the back and with the weight a little more over one foot, so it slowly turns right. The turning sequence is still slow, but it is an improvement. When I'll have more time, I'll play again with it's code and try to improve it further, but for now I am declaring it "Complete".
I have attached the current code of the robot. Perhaps anyone can give me hints on what can be improved?
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/wobbly-a-minibiped-robot
