There are still some issues that I need to solve for a smooth motion because there still is some noise on the data that I receive from the remote. I hope that I can spend some more time on this later this week.
LOL I don’t mind at all! Great work Xan! Looking forward to see more of your “BlackWido” (Phoenix) . As you said it’s almost an exact copy, even the coxa parts. WOW. Do you got any photos too?
I’m glad that you don’t mind that I made a copy of your Phoenix. I am (was) totally new at robotics and didn’t know exactly where to start in the mechanical design. That is when I saw your design, rebuild it in Solidworks and started ordering parts. That’s where my hex was born.
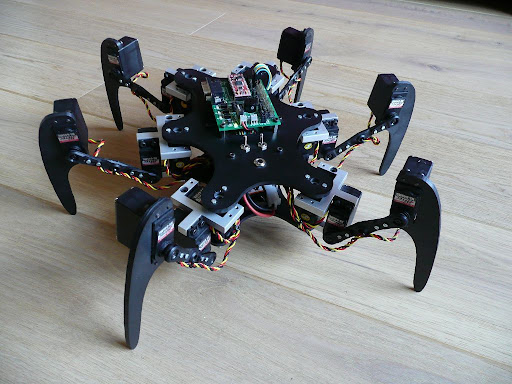
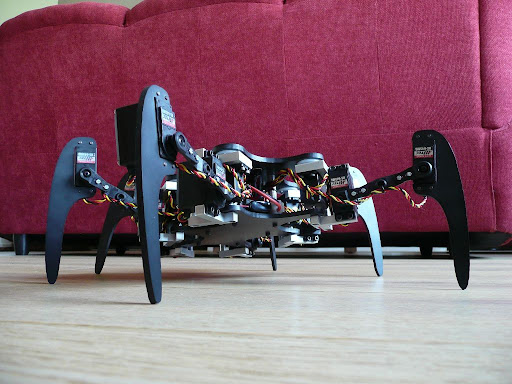
The difference between your Phoenix and mine is that I’ve got my SSC below deck which makes some room for the BotBoard to fit in. The ATOM 28 pro does all the IK calculations. Just under the BotBoard you can see the BlueSmirf.
The current status of my project is that IK is fully implemented in the ATOM. I don’t have the gait implemented yet but that’s up next. Currently I’m working on controlling BlackWido with my WiiRemote which will make testing much easier. As you can see in the movie, there is still some noise in the data that I receive with my BlueSmirf. So I need to find out where that’s coming from.
The other thing is that the WiiRemote is using the Bluetooth HID profile. The BlueSmirf only works with the SPP protocol so it isn’t possible to connect the WiiRemote directly to the remote. Right now I wrote a C# program called WiiPortal which converts the received data from the remote to serial data including a checksum that I’m sending to BlackWido. I’m thinking of replacing the BlueSmirf with another module that does support the HID profile.
Here are some pictures. I’m sure that they look kind of familiar…
I don’t know what i’m doing wrong but the photos don’t show up on the forum while looking on another computer. If i copy the link to my browser it is working just fine…
The pix problem seems to be due to an anti pix hijacking feature of where your pix are located. To see the pix, copy a link from below and copy it in to a new brouser page.
I saw the pictures! Wow you did a very good job. It looks even better than the original. I’m guessing you have a CNC mill? Smart to place the SSC32 card inside the body, are you using a LiPo battery? I’m guessing you had a “fight” with the servo wires
Did you create your own IK software/code or did you use powerpod?
Thanks for the help with my pictures! As you can see i finally found a way to post them!
THANKS! I don’t have a CNC mill myself but i know somebody who does I sandblasted the parts (even the plastic ones) when they where done to give them a nice finish.
As you can see on the pictures I’ve placed the SSC upside down. This made it easier to wire them up but still… it was a hard job because i also wanted to put the battery inside the body.
The power for the servos is comming from a custom made NiHM Battery. I’ve searched for different batteries including lipo but they where all to big or to weak. So i purchased 5 seperate NiHM Cells. They give me 4300mAh by 6V. That makes about 25 min
Yeah, I agree that Phoenix is an interesting design. I’m not sure if I’d copy the femur, but I’d like to design a coxa of my own similar to yours and/or Xan’s.
Good job Xan as well!
It looks like you use a spacer along side the top and bottom “plates” of the coxa. Do either of you use bearings? Yet one of the holes in the top piece is bigger? Not quite clear to me yet.
Sandblasting sounds and looks great on the aluminium parts. Actually we have a sand/glas-blasting machine at work, I’ll have to try that. Have someone considered using caustic soda to make a finish?
I’m currently using 2700 mAh NiMh battery. Very smart to mount the SSC32 with bottom up! 8) I’ll have to try that.
Hi Alan,
The bigger hole is caused of the spacer you mentioned (the screw is mounted the other way), take another look
Zenta already mentioned what the bigger holes are for. 8) I’m not using any bearings right now. Currently I’m using a nylon locking nut because I couldn’t find any suitable bearings in the hardware store nearby. (They are specialized in normal and big size hardware) But I’m planning to change that in some time. Zenta, can you tell us what kind of bearings that you are using?
I’ve never heard making a finish with soda. What kind of finish does it give? More matted or like a polish finish?
Lye (caustic soda) should give a matte finish. Sandpaper in one direction will give a brushed finish similar to that offered by LM. I need to do something to my tibia parts as well. I’d also like to try an anodize finish some time. There are kits available.
OK, bigger holes to clear the SHCS for the spacer. I still need to work out the design and dimensions of the coxa plates. As to the bearings, I need to find about 2 dozen! I’m also inclined to go to imperial dimensioned parts. Hard to find inexpensive ones with flanges.
I’ve purchased some bearings for the coxa part but I didn’t mounted them on my hex yet. After a few weeks of struggling with my wii remote I’m able to use all his data. So this weekend I’ve spent some time connecting the received data to the already implemented IK model. The only thing that I’m missing at the moment is rotation on Y. Maybe next week… youtube.com/watch?v=vPI3zhylXW4
Zenta, you’ve asked me if I’m planning to share my code. My code is isn’t even close to finished. But if you need something, I will be happy to return the favour! 8) Are you also planning to add a onboard CPU?
As you’ve noticed some legs are slippery on the wooden flour. I don’t know if I can solve this by recalibrating the servo positions (hate that) or adding rubber socks in some kind of way. Does your phoenix act the same way on a slippery surface?
I see you have it walking with Atom Pro code. Nice work, very cool! Lynxmotion would be happy to host a project page for Phoenix (Black Widow) code. That way there is one place for all who have this design to help each other with the process. Just let me know if you’re interested.
One word to describe your walking gait: smoooooooooooooooth!
That is one of the most fluid gaits I’ve ever seen… It’s a ripple-style gait right? Did you modify the code generated by powerpod, or do you have your own IK generator from scratch?
Yes I’m waiting for the atomboard and a red Phoenix from Jim! And, YES! I’m very interested in your code. I don’t have much time for making robots and since I’m in the middle of a third project (Felix, a SES based 4x4 DOF Quad ) I would be very happy to not spend many ours of making my own code. (I’m not an experienced progammer either ). Jim’s idea of a community sharing sounds great!
As you mentioned, the calibration are important. Also the kinematics and gait algorithm.
My Phoenix are also a bit slippery but not very much, and she makes a lot of noise when walking on the hardwood floor The rubber socks is a good idea. I think the Lynxmotion Phoenix comes with rubber ends?
Thanks for all the great reactions! The funny thing is that is spend over a couple of months to get the IK model in there. The gait that is on youtube was made in just 4 hours (using the IK) .
Jim, off course I’m willing to share my code and a project page would be a good option. The only thing is that my code isn’t ready to be published yet. Programming is still in progress and I need to cleanup and optimize my code. I’m working on this project for 4 to 8 hours a week so I can’t really promise when I can publish a good, bug-free version. But I’m willing to place some updates once and a while and explain how thinks work. What do you think?
Thanks tom, I’m using a ripple gait indeed. With IK fully implemented it is easy to change to tripod or a wave gait. I fully build my code from scratch. It was (and is) very time consuming but that was the only way for me to fully understand what I’m doing.
I can’t wait to see another cool project comming out of you hands!!











 you did a very good job. It looks even better than the original. I’m guessing you have a CNC mill? Smart to place the SSC32 card inside the body, are you using a LiPo battery? I’m guessing you had a “fight” with the servo wires
you did a very good job. It looks even better than the original. I’m guessing you have a CNC mill? Smart to place the SSC32 card inside the body, are you using a LiPo battery? I’m guessing you had a “fight” with the servo wires 
 so there is a movie of his first steps.
so there is a movie of his first steps. ). Jim’s idea of a community sharing sounds great!
). Jim’s idea of a community sharing sounds great! .
.{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}