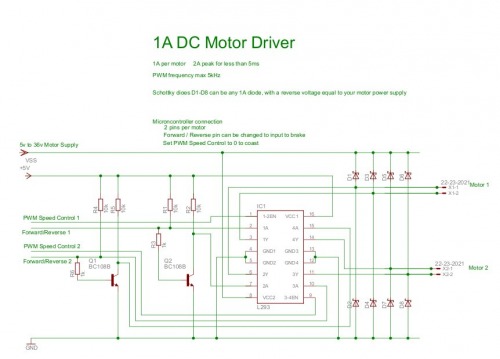
After a quick Google search, I couldn't find a schematic for the SN754410 with the clamping diodes. Instead I found this document which uses the L293. Could I use it to build the motor controller with the SN754410? What changes would I need to do to use one motor per IC to double the max continuous current? I have some 1N4006 diodes, could I use them in this circuit?
If you really want to bother with it, some 1N5818 diodes would work, high speed schottky diodes, using the above schematic. They really aren’t needed as I’ve used the 754410 all by it’s lonesome with no ill effects.
The 1N4006 is a general purpose diode, not high speed, as Rudolph stated.
I believe the diodes in the I believe the diodes in the 754410 are for ESD, not for clamping. There was a discussion in guibot’s L293D tutorial. But just curious, how much current are we talking about when you say “I’ve used the 754410 all by it’s lonesome with no ill effects.”…just to have an idea/limit. Thanks.
Up to it’s rated 1.1 A Up to it’s rated 1.1 A continuous rating, and probably pushing the 2 A peak in regular use.
I’ve worked on “fry testing” the 754410 in a product, using a Faulhaber 2342 motor with a 7.2 volt NiCad supply. At that voltage the motors would require a stall current of around 5.1 A. The h-bridge made a real purty flame when held for a few seconds, but they could take a few reversals without the spiking killing anything.
So… could you tell me the difference between an ESD diode and a clamping diode? They both appear to carry electricity to me, and both seem to be oriented in the same direction. Do they have different ratings? (Possibly) Can they tell the difference between ESD and regular spikes? (Not likely)
(Yes, I’ve read the objections posted various places about the diodes, but seriously have had no problems in actual real-world use.)
Yes, but their stock is very limited and their prices are not the best. I recently bought some components from Mouser and I’m very satisfied with the price and shipping…I just forgot to include the diodes! But for now, I’ll do some tests with a GM9 (stall 1000mA) just to see something moving. I’ll probably add the diodes later. By the way, maybe you could answer robologist’s question about ESD vs. clamping diodes.
Question: I read you wanted to get a PhD to teach something related to Robotics. What have you done so far? I mean, what’s your story/trayectory? I’m studying Mech. Eng. and I would really like to focus on robotics in a near future, but here at my college the only robots I’ve seen are useless (rumblebots) and the info on this topic is very limited.
So far I have my undergrad in computer science, a master sin Info systems and I am working toward another masters in CS with a focus and thesis in robotics/AI/HCI/robotics in education. Next spring I will be working on some robotics research projects to build up my resume for my PhD application. I prob won’t finish this masters until Fall 2011 so I would hopefully start the PhD in Fall 2012. We shall see! SIUE does a lot of robotics in various areas. They do beyond botball competitions every year, (botball for junior high and high schools in the area), the are particiating in a national competition where they ar emaking an autonomous single passenger automobile (think of the DARPA callenege but with golf carts and power wheels instead of full sized cars), they also do a lot of research into syncronous robots, spontaneous hetereogeneous robots, etc. I think at any given time people are working on 2-3 competetions and 4-12 research projects/grants.
In about a year I will start my thesis so I’m hoping to get some good ideas/problems I can try to tackle.