

I recently bought a 3DOF T-Hex with the Botboarduino V1.0 and the SCC-32. To say the build instructions are awful would be an understatement. To try and follow the one paragraph description for downloading the firmware and configuring the device, well, impossible. Is there some better source of instructions that show which firmware needs to be installed in each device, a proper guide to setting up communications between them, and how to get the program to compile with the missing files?
Thanks,
Steve
We do apologize for the state of the instructions. All instructions for assembling the T-Hex can be found here:
lynxmotion.com/driver.aspx?T … em04#thex3
Please note that you do not need to update the firmware on the SSC-32 or SSC-32U.
The T-Hex uses the same code as the other hexapod robots, so assuming you are using the BotBoarduino, you can use the tutorial here:
lynxmotion.com/images/html/build99f.htm
If you have any questions at all, feel free to reply here and we will make sure you get your robot walking.
OK, I have the program compiling without errors and it appears to be downloading, I used board type " Arduino Duemilanove or Diecimila", is that correct?
I connected a USB to RS232 adapter directly to the SCC-32 and ran the calibration program (The Lynx terminal program) and calibrated all the servo settings.
Now, when I plug the BotBoard into the SCC-32 and turn it on, I don’t get any response. The board chirps and the TX/RX lights are flashing but nothing happens.
Are the jumper settings shown between steps 4 and 5 in the build99f document correct?
The BotBoard docs show a completely different connection to the SCC-32, which one is correct?
Thanks,
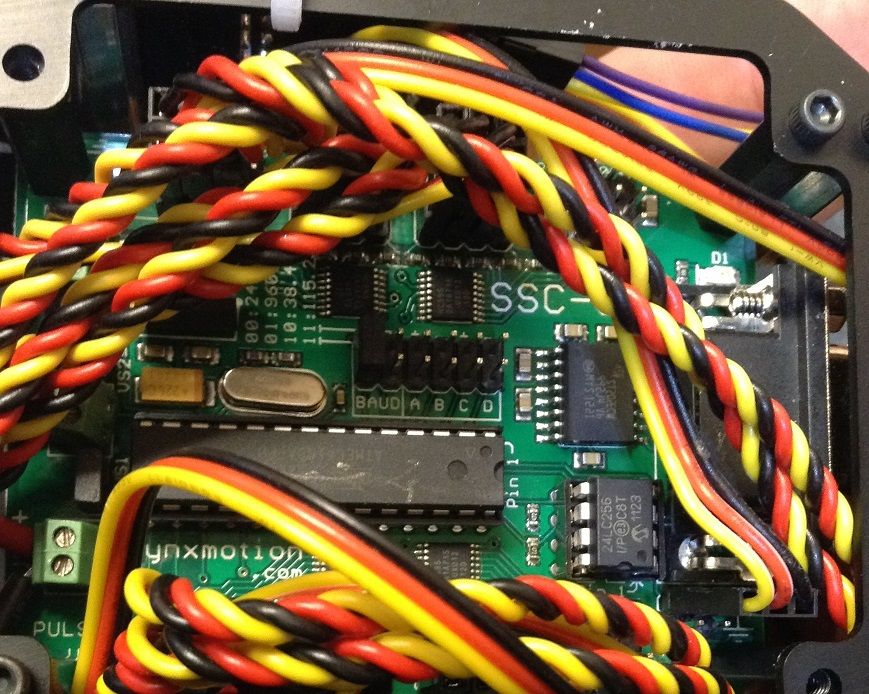
Can you send us a few images of the electronics so we can clearly see all of the connections? Thanks.
{kind=link}
{kind=link}
{kind=link}
For the PS2 connection, try reversing the 3-pin cable for pins 6, 7 and 8 on the BotBoarduino.
The board type is Arduino Duemilanove and you need to choose the right COM port.
When doing calibration via Lynxterm, you need to connect the SSC-32 to the computer as opposed to the BotBoarduino, and add the jumpers as well.