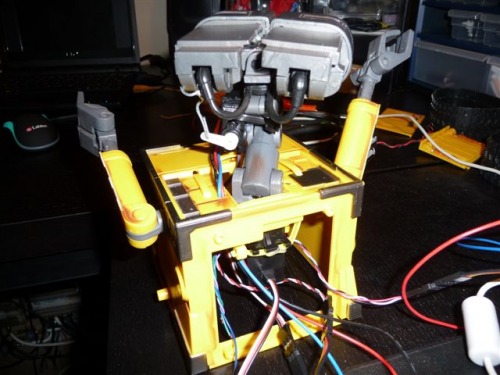
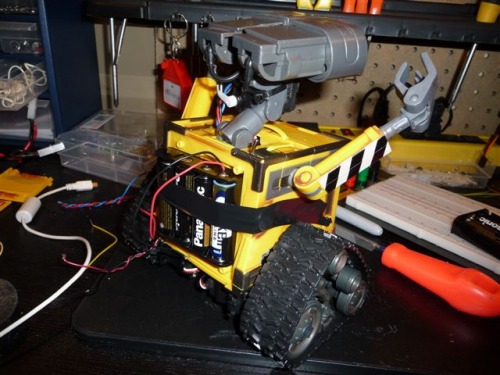
My Robot is a Wall-e Toy, i got the idea from DJSURES (Thankyou for that)
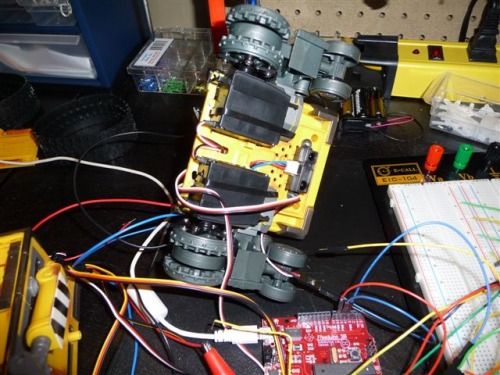
I took apart the wall-e toy, extracted the voice eprom so i could use it. Added two arm servos, two continuos rotation drive train servos, 1 neck servo, and 1 head tilt servo. Also two IR distance sensors.
This project has been very, very fun.
I would highly recommend the $35.00 wall-e push toy, for surgery.
Edgee has already asked about the first step, does it move ? The best thing to do is try to get the motors to turn and just get the robot to drive forward, turn, spin, go backwards. The second step would be to read the sensors and report the values, then put an object in front of the sensors and see how the reported values change. Write a short program that simply tilts the head up, down, right, left. As you write these small subroutines, save them all, you can start to combine them later to get the robot to move around on it’s own and react to it’'s environment.
Hi again Edgee, i do have him moving with a program i found called serb, thought i would try it. It’s cool. But i will start writing my own routines and piecing them togehter, i am just still trying to figure were to place the routines, it’s coming.
Wall-e is Complete , just no proper code yet I would like him to wander around autonomously, exporing. But maybe when i learn how to code properly i will get him to do that.
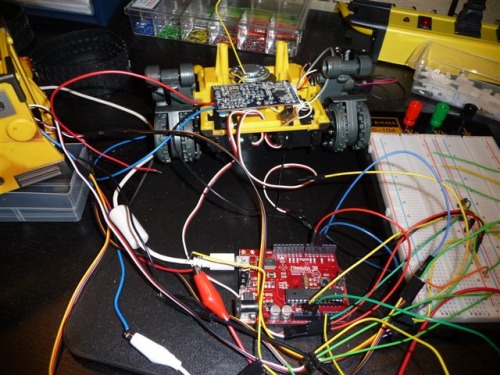
do you have a diagram of how you have wired up the sensors? I am trying to “reverse engineer” the circuit from the code but I am not sure about things like bias resistors and it is a little hard to see from the photos.
I am working on a subsumption library for the Ardunio, it’s a bit stalled because I am overseas at the moment.
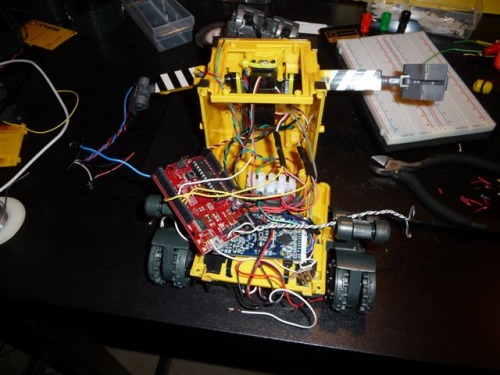
I have the two sharpe i/r sensors hooked up, just simply power and ground to each one, then the blue wire (Vout) to the analog input pins #0 , and #1 on the arduino board.
quick question, you are outputting the value of the forward Sharp IR to the serial port, what values are you seeing?
Do you get a increase in value as you move say a peice of paper closer to the detector? once you get to about 8cm the value will start dropping again due to the geometery of the detector.
I have been looking at your code, I have identified a few things you should check, (I will do more over the weekend, I have just got home and have not slept in 20 hours so I need some rack time).
Firstly the mail look
You do two comparisions
if (distance < dmintemp) and if (distance < dmintemp)
both these are true the first time through and the net result is
I’ll start posting my code on my site soon. But I’m using a PIXAXE, not an arduino, similar.
Do you just have the one sensor on the bottom? I have the same Sharp sensor, couldn’t find a place for it so I attached it around Wall-e’s neck. Not the best ,but at least I can get distance measurements from left, centre and right directions.