

20/11/11
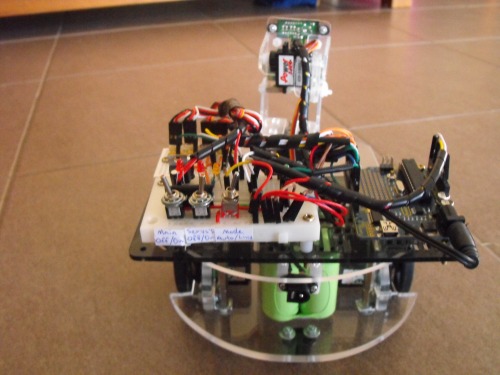
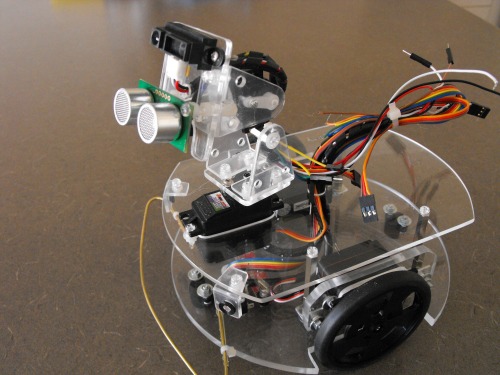
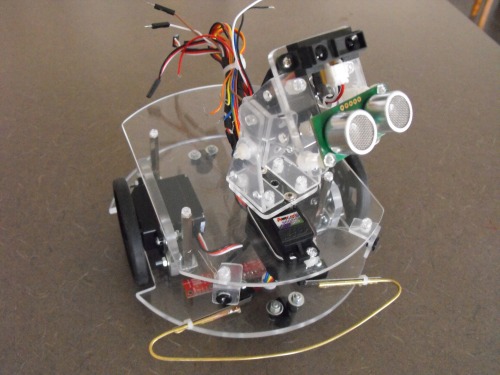
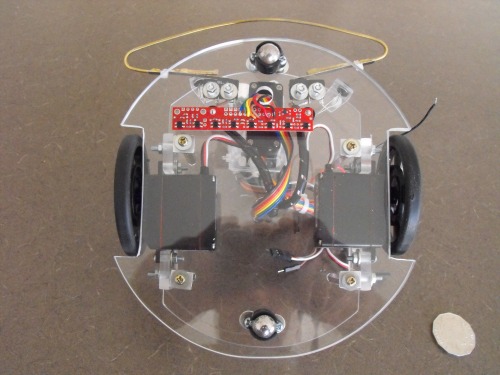
This is my new autonomous line following bot starting to take shape and a much more slicker design than my last bot attempt.
It's made out of clear perspects and the actual design is based on the Ardbot which was published in the Servo Magazine some time back.
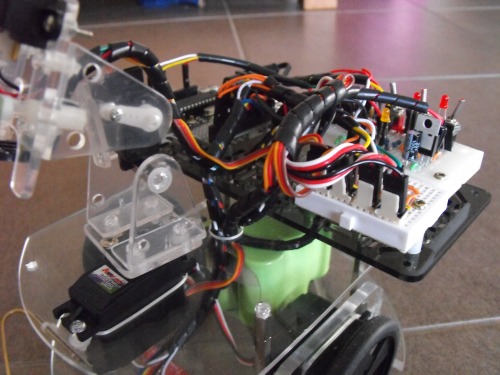
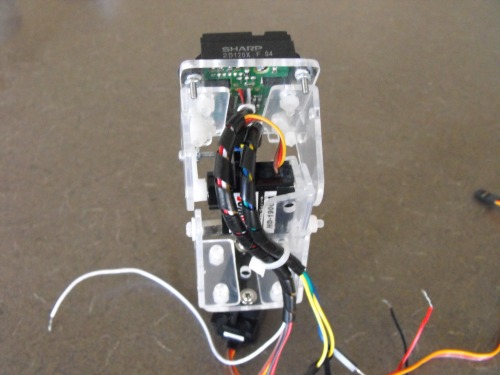
Currently has clear pan/tilt bracket head i made up using a micro servo with a Sharp IR and SRF05 sensor mounted on it, not sure if there is a huge benefit using both sensors but i guess i will find out.
Also uses bumper switches and light sensors, and underneath an IR sensor array for line following. Still a work in progress and will be working on the circuits and the code for it and will post a video once it is running..
Update: 27/11/11
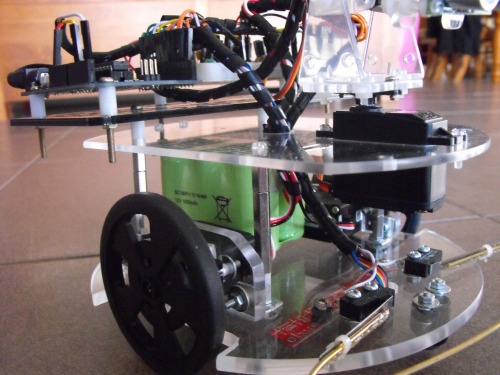
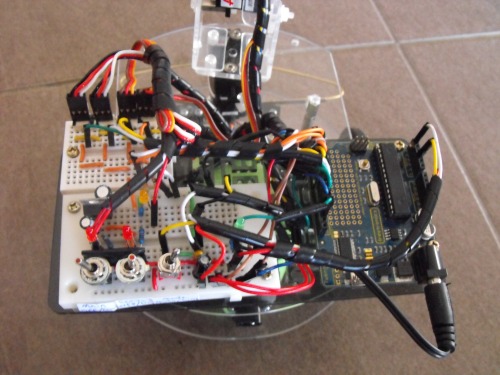
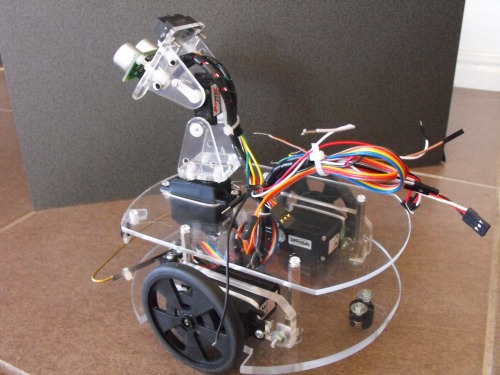
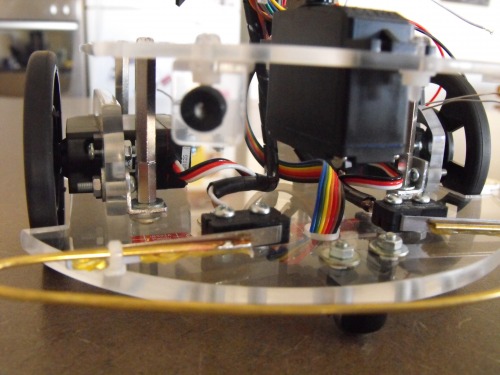
Have all the sensors mostly wired in and using breadboards for now mounted on a Pololu expansion plate to give me room. Added rechargable Ni-Mh batteries and jack i took out of our 12v rechargeable vacum cleaner that the wife almost threw out on me.
Currently using bumper switches which work quite well but i want to replace them with IR sensors down low front and back. Once i have finished testing and altering circuits i will make and solder them on a proper PCB board. Then i will expand on it and make it a 3 teir which will nearly make it twice the height it is now.
Have the code working ok now just needs a bit of tweaking. There is still alot i want to do and add to it and am wondering would i be best off to upgrade to a Arduino mega or try and use 2x Atmega328's?

Posted 20/11/11
Autonomous line following bot
- Actuators / output devices: 2x continuous rotation servos, 1x standard and 1x micro servo for pan & tilt head
- CPU: Arduino Duemilanove (328)
- Power source: 8.4 v 1000mah battery pack
- Programming language: C#
- Sensors / input devices: Sharp IR, SRF05 Ultra Sound, bumper switches, Pololu IR Array
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/vac-bot
