I have two 7.2V 1200mAh NiCad packs. One is connected to VS1 directly feeding 4 Hitec HSR5990TG servos. The other is run into a MPI 6V regulator which is bypassed at <6.3V incoming,from here into VS2 running 5 Hitec HSC645MG servos. VS1 and VS2 are electrically isolated via removal of jumpers. VL is also on its own fresh 9V alkaline supply and also unjumpered. I am controlling the SSC-32 with bluesmIRf modem which runs fine and stays connected to my laptop and the Visual Sequencer at all times, which is verified by the SSC-32 blinking when sent commands.
Problem is, I can hold a pose or run a sequence ok very shortly, lets say 3-5min. Then suddenly, either VS1 or VS2 will dump and that bank of servos will go limp. Upon checking the packs, VS1 pack reads 6.4V and VS2 reads 5.6V
I was expecting more running time than this. Am I crossing a minumum threshold to cause this? I am not sure if moving all servos at once could be causing this either. Could I be pulling too many amps? I have no idea how to check this. I still have a 5v 1A camera and two 3.6V 1.5A motors to add to this mix. I have tried swapping these old packs for some brand new 7.2 NiMH 3600mAh packs to no avail. One pack even read 7.4V after going slack!
Many people have built LM Scouts using 12 5990tgs before, so where am I going wrong? Please help, my participation in RoboGames is riding on this!
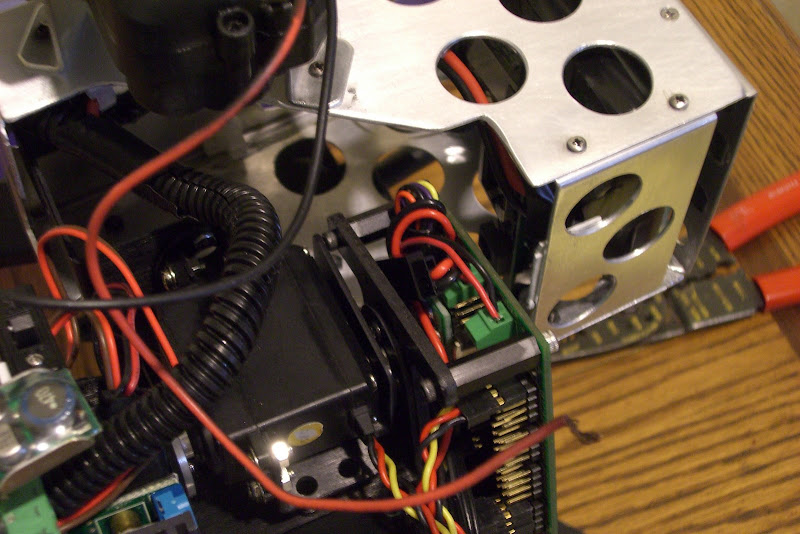
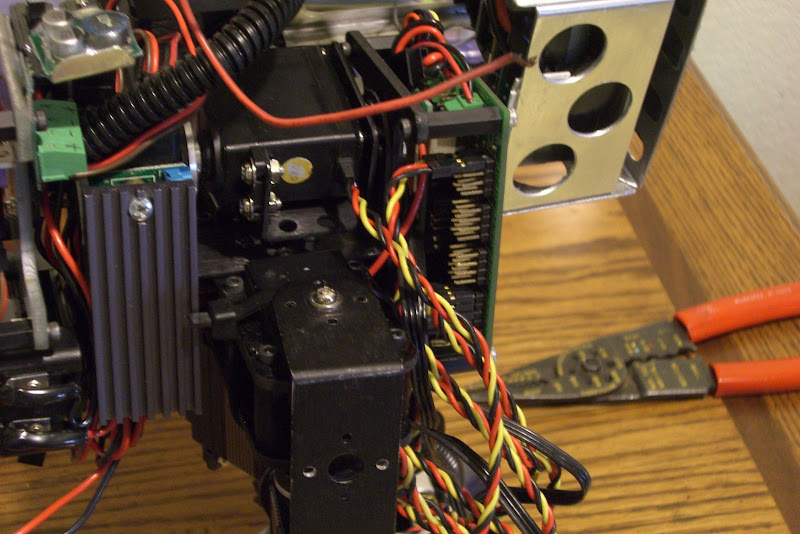
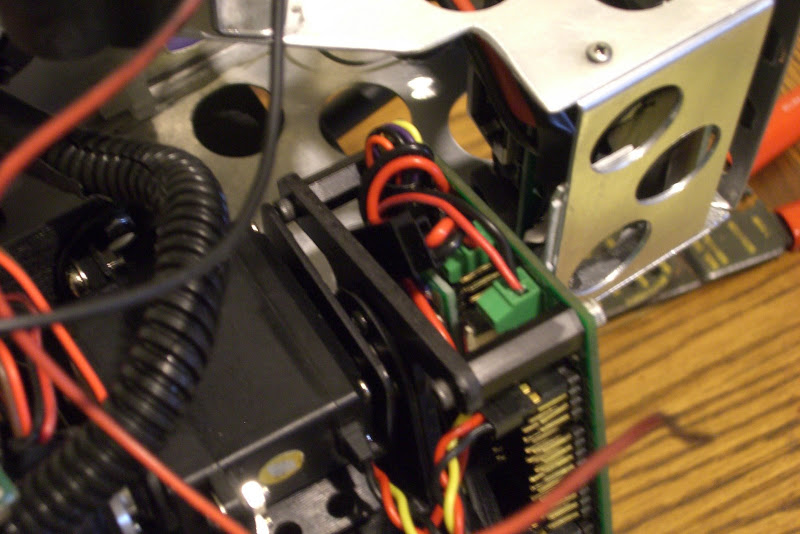
Awesome bot! Can you post closeup images of the battery wiring?
What gauge is the wire?
Are there any connectors or switches that could be dropping power?
The 5990’s have an auto shutdown if they get too hot. Actually there is no temperature measuring device in the servo. They determine the temperature using a formula based on the current draw and the elapsed time. That “could” be effecting the 5990 side.
The 645’s will happily melt into a pile of goo if allowed to do to much work for too long. The MPI regulator may be letting go, but can’t say for sure.
If it were me I would get a single, or a pair of nice 7.4vdc LiPo batteries and run them direct. This is (or was) a very common practice with robo-one entries. The 5990’s are designed for this. The 645’s will tolerate it for a match, 3-5 minutes, before a cool down is required. Also normal for robo-one style bots.
I fully charged the packs overnight. This morning’s run time was two minutes. The servos never even got warm.
Now that you mention it, there are quite a few bottlenecks in my wiring. The packs start at 10G[Deans Plug]5" 14G[Z conn.]3" 14G[6V reg–]]out from reg 3" 14G[Z conn.]5" 14G into [switch/Y]]out from switch 5" 14G[Z conn.]8" 16G! to VS1 terminals.:oops:
The situation on VS2 is not nearly as bad, but still… start at 10G[Deans Plug]5" 14G[Z conn.]8" 14G soldered to VS2
I’ll wire a deans plug with a straight run directly to the board using some 12G.: Let ya know if this helps. And thank you for your prompt response!!
Getting rid of the smaller gauge wire is always a good idea. However if the servos are not getting hot, then I doubt your problem is with excessive current draw. How old are the batteries? NiCad are notorious for the memory effect. Your batteries may be too old and tired? BTW you can cut the weight in half by using NiMH.
The batteries are quite old, say from '99, my r/c racing days. However, they still have juice in them after my bot has gone limp. I had heard about the weight savings with NiMH so I bought a couple, same issue. And they are almost double the weight! They are Tenergy 7.2V SC3600 Titanium packs.
I need to say you may be chasing more than one problem here. The NiCad pack is too old to be useful. So any testing results using it should be thrown out immediately.
First off it would be much better if you used a 5 cell pack without a regulator. Please try the sub-c pack. The sub-c pack should be able to power all the servos with little effort. I bet it could power the bot for 30 minutes. Please tell me the results when using this battery.
heh… 10yo AA NiCds might read terminal voltage ok when not under load but if you put a couple ampere load on them I suspect you will find their internal resistance is pretty high. 8)
Ah I see. Well what I should have said was a NiMH should weight half that of an equal capacity NiCad. Ok dead horse kicked sufficiently. Sorry for any confusion. Good luck! I really want you to be successful! 8)
Ok, running 1 new NiMH pack straight to the ssc-32, VS1=VS2. I saw better performance, the 645’s took the extra voltage like champs. Still, after a couple minutes, (five max. I guess, wasn’t counting) a lone knee servo (5990TG) stopped responding. Still no overheating from any servos, that’s good! Shouldn’t this pack be enough to run this mix of 9 servos for at least 15 minutes?
Yeah, something does not seem right. My brat uses ONE 6v NiMH battery pack and it powers both the SSC-32 and the Bot Board II as well as all 13 servos and it will run for about 20 min. I dont understand why you are getting such short run times.
Both were supplied from one 7.2 NiMH, VS1=VS2 jumpered, pack has 6.26V remaining on first charge. Using uninterupted 16g wire soldered to lead pads on ssc.


 The MPI regulator may be letting go, but can’t say for sure.
The MPI regulator may be letting go, but can’t say for sure.


 However, they still have juice in them after my bot has gone limp. I had heard about the weight savings with NiMH so I bought a couple, same issue. And they are almost double the weight! They are Tenergy 7.2V SC3600 Titanium packs.
However, they still have juice in them after my bot has gone limp. I had heard about the weight savings with NiMH so I bought a couple, same issue. And they are almost double the weight! They are Tenergy 7.2V SC3600 Titanium packs. Yeah, I have a 3"x3" target plate/billboard aching for a LM sticker assuming I can lick this today.
Yeah, I have a 3"x3" target plate/billboard aching for a LM sticker assuming I can lick this today.