Hi there! I’m choosing motors for my robot. LynxMotion 36GP-540-51-EN seems to match my speed and torque requirements, but I’m unclear about two things.
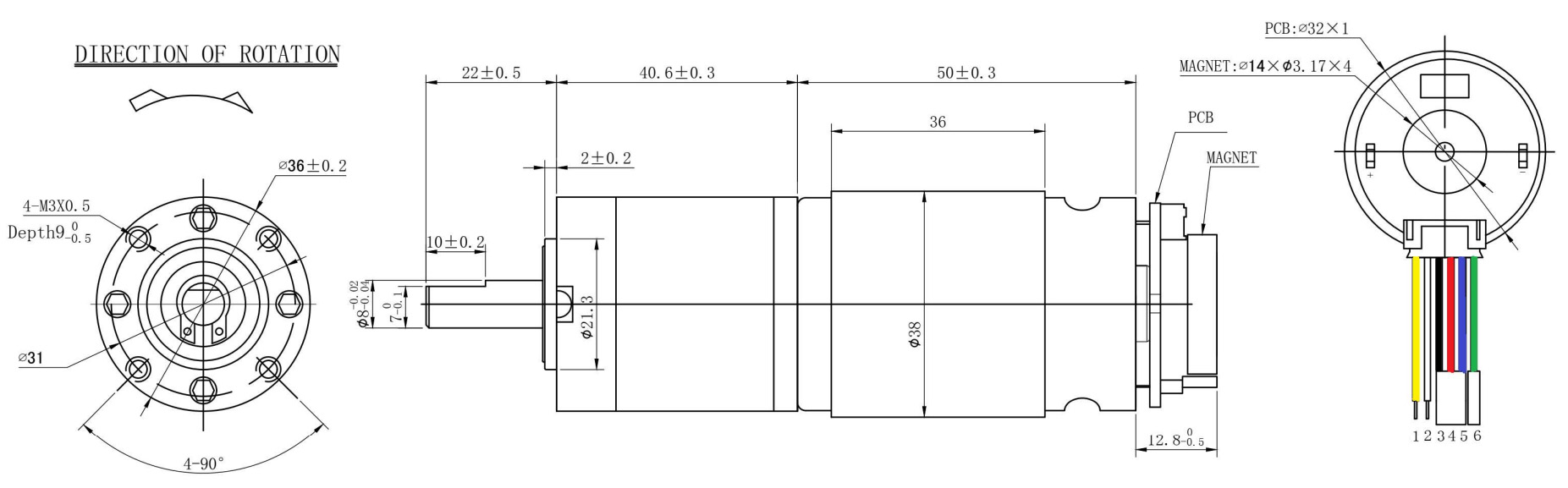
First, the drawing shows “direction of rotation” to be clockwise. Does this indicate that this is a unidirectional motor?
Second, RobotShop says “Stall Current: ≤20 A”, but the LynxMotion website says “Current: 0.5A (no load); 3A (stall)”. What is the current draw when the motor is operating at its stall torque?
Hi @CopperGenie Welcome to the RobotShop Community.
Negative. It’s bi-directional. The direction of rotation is when the 12V positive is connected to the positive terminal and negative to GND. Assuming you will be using a DC motor controller, you’ll have full control over direction and speed of rotation.
Second, RobotShop says “Stall Current: ≤20 A”, but the LynxMotion website says “Current: 0.5A (no load); 3A (stall)”. What is the current draw when the motor is operating at its stall torque?
Our bad. The Wiki needs to be updated. The original spec sheet:
Note that you should NOT operate the motor at stall torque. That’s effectively locked shaft so the maximum current goes to heating up the wires and coils (and the motor starts to smoke and then burn). For normal applications, operate and DC motor at ~1/4 stall max and take note of its duty cycle.
Thank you for clearing that up! You mentioned that DC motors should be operated at about 25% of the stall torque. I was intending to operate this motor at 40% stall torque (3 N-m) and I expect it to draw about 8 amps of current and rotate at about 100 RPM based on a linear curve. Please excuse my inexperience here, but would you mind describing why it’s not recommended to go above 25%?
For a motor to operate continuously without overheating, a quick rule of thumb is to operate it at 25% stall (and even so, it will still get warm an eventually need to cool off). The current consumed is what causes the heat, and higher torque needs higher current, which means more is lost as heat. A motor can operate perhaps at 50% of its max torque for a very brief period (think a few seconds), but not much longer. There are many articles and forum posts specifically about this question.



{kind=link}