

So i am finally doing what i have always wanted to do. I learned about this at diydrones.com but am posting it here first.
This is the UAV board used called a ardupilot available at sparkfun
This is the GPS used
This is the FTDI programming cable.
The plane is a SDM wildhawk found at raidentech.com. I am hoping to have it done next week but am still waiting on my 6ch transmitter and receiver. I have yet to order my sensor for keeping the plane stabalized but hope to order it tomorrow. I will keep you updated.
Me talking about the thermopile sensor
my 6ch controller for the UAV
problem im having
problem sort of fixed. Sorry for my hair.
-----------------------------------------------------------------------------------------------------------------------------------
well i took the plane out rc flying today and it went straight up and come back down crashing to the ground. I think i just have to add a little weight to the front because its "tail heavy' i read. I will hopefully get this solved later today.
ok time for a new update. Well my plane does not fly rc at all. IT SUCKS. it was way under powered and just plan bad. So i have sent it back for a refund. I have now bought an Easy Star with a brushless motor, lipo, and 40amp ESC. My new ardupilot has came and i now have some square headers on it which make way better conections than before. I beleive this was my only problem. But we will se next week as i beleive there are no more things to fix and tweak.
here is a quote some one told me which i think was kinda harsh but i learned my lesson i think
" There seem to be two paths for new RC pilots:
1. Buy what looks cool or scale (like a real aircraft), crash on the first attempts assuming there are more than one, throw it all in the trash and get into another hobby.
2. Buy what looks cool or scale, crash on the first attempts, buy what everyone told you to buy in the FIRST place, learn to fly and enjoy the hobby."
I thought my plane was going to be fine it was a easystar knock off. I did not crash it and throw it in the trash though, i was able to return it so all good there :).
-----------------------------------------------------------------------------------------------------------------------------
ok so more of my parts came today for my new plane the easystar.
Lipo battery rated at 2200mah and a discharge rating of 25-35c.
25amp Turnigy brushless inrunner motor
Lipo battery balancing charger
Simple diagram that is how good setup should be.
Battery amps>Esc amps> Motor amps
That will allow everything to run without getting to hot and allows the battery and ESC to have extra amps if needed.
---------------------------------------------------------------------------------------------------------------------------------------
Ok my Easy Star came today. Also my hs-81 servos came. So ill be updating in a few days once i get it built and start
some ground testing. I need to make a trip for some gorrila glue tomorrow so i can start building this plane which came
in many pieces. Hmmmm what is this part for?. But anyway this project is still going just a slowly. Like i said i hope for
some working ground test for you this week and some new video and pictures. But i have alot of other stuff todo so its
not #1 on my list, but i will get it down so the wait is almost over.
--------------------------------------------------------------------------------------------------------------------------------------
Well put together like the whole plane today just the UAV part tomorrow.
so here is the first pic. This is after i glued the two halves using Gorilla glue and taped it as it dried.




so above is a picture of the wings with the wing spar compartments being glued in and drying

above is the canopy top with the locking tabs glued in

above is the rudder with servo connector glued in. Now that was too big so it had to be shaved down.
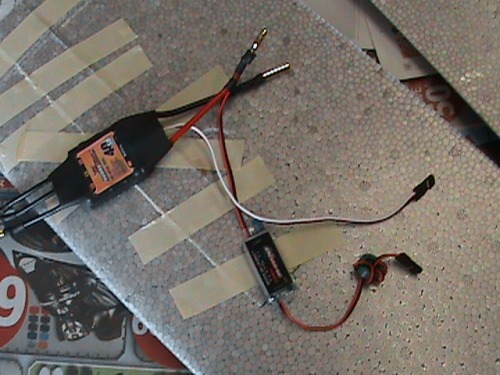
so above i had to solder the UBEC to the battery input wires of the BEC in order to give it power so it can power the receiver.

above is the rudder and elevator drying
above is the hs- 81 servo which fits perfectly. I dont know if you can see but the bottom of the capartment had to be cut out because the servo arm was dragging.

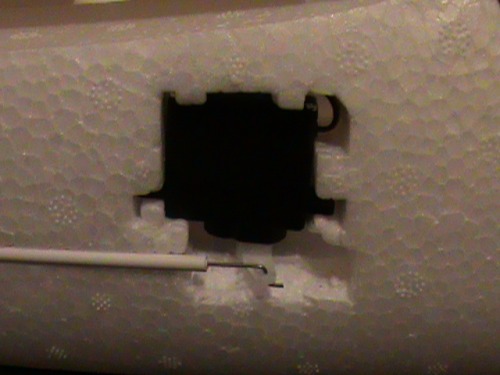
above is the canopy with velcro for the gps and a notch for the battery wires of the ESC.
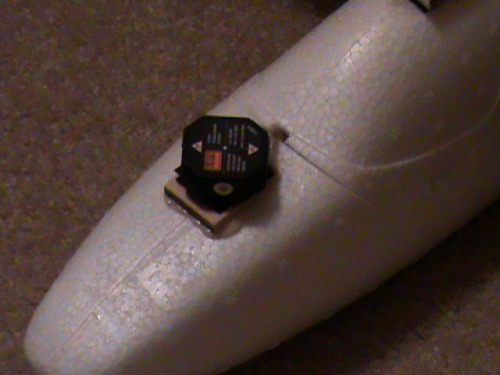
so above is my sensor on its little mount that keeps it level since the nose is not.
This sensor is velcroed to the mount.
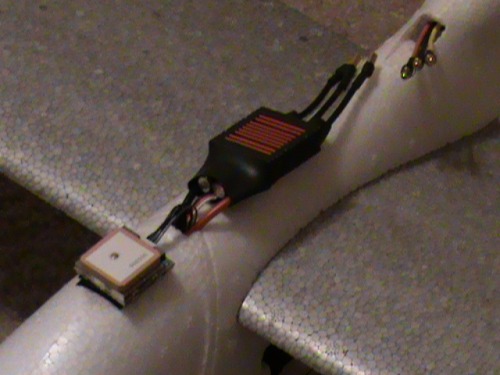
Above shows the gps and ESC both velcroed down and the UBEC is in the plane. Yes the BEC is on top of the plane
it has short leads and ive seen alot done this way so what the heck.

and the partly finished plane. Well its finished on the out side just not the inside so thats what the plane should still look like when done.
------------------------------------------------------------------------------------------------------------------------------------
Well today i sent my board on a vacation. Off to a person who is going to check it for me. I had no manual control on manual mode of the uav code. Its kind of weird has to be a board issue. So he (Chris Anderson) is going to check it with his controller and receiver.
I also flew it RC with today because i will need to be able to take off and land. Well it didnt go so well. It was good at the start, it went up and straight, the turned right and went upside down :(. Of course it crashed.

Above is where the propeller started cutting into the body of the plane because the motor had moved.

The propeller also cut the mount a little.

Well that is the main damage which is a big crack in the nose. I glued and taped it and now hope its good.
Ok so here is my hypothesis as to what happened. I believe it to be correct as to the crash was not instant. Well i think that the motor had so much power that it pushed forward in the mount ( exactly how i found it laying on the ground). Now i believe this to have happened in the air as i cut power to the motor before crashing. That means that the propeller could not of cut the foam if it happened during the crash on the ground because it was off and not spinning. So back to what happend, the motor pushed forward in the mount and the propeller hit the foam causing it to stop spinning. The motor then began to spin in the mount and twisted the lead wires (this is based off of how i found it on the ground with really twisted wires). In the end i believe a jerk could of sent the plane crashing or due to the lose of movement from the propeller so it may just of simply fell out of the sky. So i believe a combination of holding the plane just before take off while the propeller was spinning, and the resistance of the climb up caused the motor to be pushed forward instead of the plane. So that is what im pretty sure caused it. Took me a while to understand. But that means restraining the motor will keep this from occuring next time. I should of done that to began with.
oh and the sensor and gps places need to be swaped because some of the sensors are being blocked by the plane.
And the ESC is now in the plane.
----------------------------------------------------------------------------------------------------------------------------------------
Well i am back from my cruise (it was great :)) and i now have my board. Ive started school today so i dont have much time now to work on it. I did get to plug it up today and the manual control is now working. It turns out i had burned one of the traces :/. Thats now fixed with a little jumper wire. So i do now have manual control. I tested a little of the autopilot mode really quickly. It did something but not really working yet. It was a quick test and im not saying i had it all done right. Well thats it for today
Flys GPS waypoints
- Actuators / output devices: 2 servos and one motor
- Control method: autonomous but take off and landing
- CPU: Ardupilot with Atmega 328
- Operating system: Vista
- Power source: 8.4v nimh
- Programming language: C
- Sensors / input devices: GPS, Thermopile
- Target environment: outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/uav



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}