

Dear: LMR
Personal Backstory
Hey guys this is me Noah again. Recently I had made up my mind that I wanted to participate in a robot competition that would be fun and realistic for me. The reason I am posting this right now is that I feel if I don't post something immediately on the internet I won't have any motivation to continue on with this unbelievabley awesome project. At first I wanted to participate in a LMR competition but so far there were no competitions that would be good for me. That is when ggallant told me about the Trinity College Fire Fighting Robot Challenge and that really got my head in the game. The competition will be great for me and I still have some time to do it. All the parts I need for this competition I can find in my house and I probably won't need to buy too many parts outside of the house though. Wish me good luck!!!
Present Robot
So anyways I found this nice pokemon card tin from my sister in the basement where I came up with what I want the robot to do. I decided the robot was going to be a two wheel ballancing robot. I then got some pololu 37mm 12 volt motors and glued them to the tin with hot glue. Then I drilled two holes inside the robot for putting the wires through them.

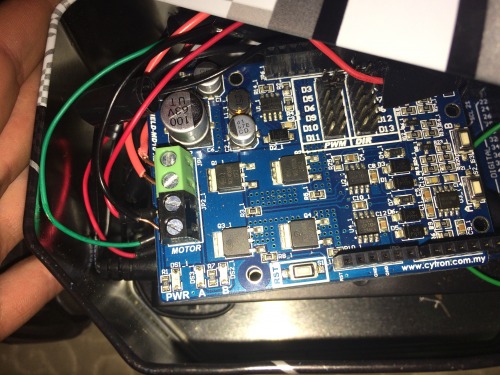
After that I did some coding and wiring and I got my two Cytron 10 amp arduino uno shield to work with my mega 2560 arduino shield. Shortly within the same day I drilled some holes for a power switch and an led which would be a necessity to use the robot and a rule for the competition to have one.
My electricals also look very crowded like this inside my robot.
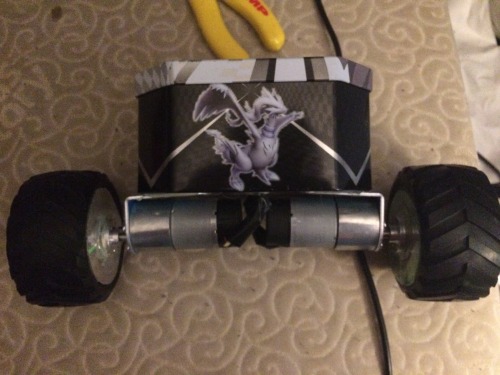
Right now for the moment it moves in circles on it's side and doesn't do much. Here is a much better view of the robot right now.
Anyways that is the robot's present wearabouts. Thank you.
Robot's Future
This robot is going to have a big future. It will need to self ballance with an IMU, use a webcam for machine vision with lasers, use raspberry pi zero with ros, and put out a candle with a robot gripper. The robot gripper I already have and looks like this.

This will put out the candle for the challenge like how humans put out candles with there fingers.
Conclusion
Well I wouldn't get so far ahead of yourselves. This robot is not finished not yet at least.
Put out candles and solves a maze
- Control method: autonomous
- CPU: Arduino Mega
- Operating system: Linux, ROS
- Power source: 8 AA batteries
- Programming language: Arduino
- Sensors / input devices: USB webcam, IMU
- Target environment: indoor, Trinity College Firefighting Maze
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/two-wheel-self-balancing-trinity-college-fire-fighting-robot-contestant