

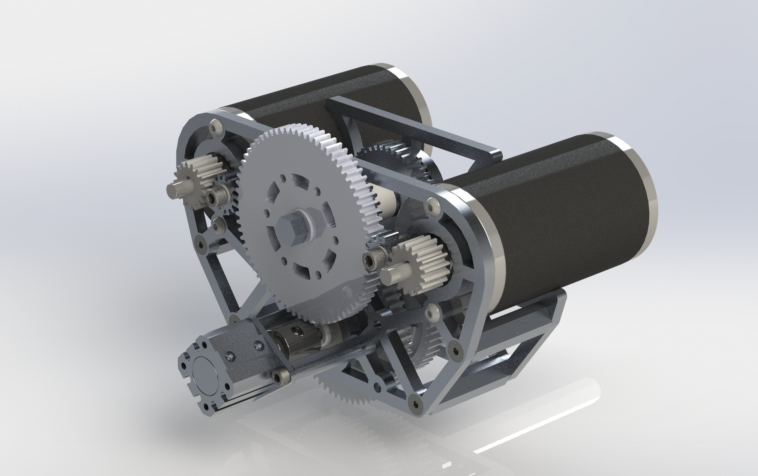
I come from the FIRST Robotics Competition, and recently, I designed a gearbox that can shift between two different speeds. This is mounted "invertedly", meaning that the motor shaft points inward of the test chassis as opposed to outward. The piston has a special mount called the "DOG" gear, and that latches to either of the two gear combinations on the lower shaft, allowing that shaft to rotate with that combination's speed and torque.
The design has some flaws (like for instance, I forgot a shaft clap to hold the big gear in place). So my question is to the other robot builders: do you find a practical use in implementing such a gearbox, or would you prefer to stick with single speed gearboxes, or similar ones that are not as complex? I'm just wondering, because some people say I'm "overdosed with FIRST," and I also want to design robots on my own with different purposes, and I find LMR to be a great resource because there are builders from different backgounds with different expertise. Keep in mind that in the competitions, these are usually designed for pushing matches against other robots for defense, and so that the current doesn't kill the electronics.
Thanks!