Dear: LMR
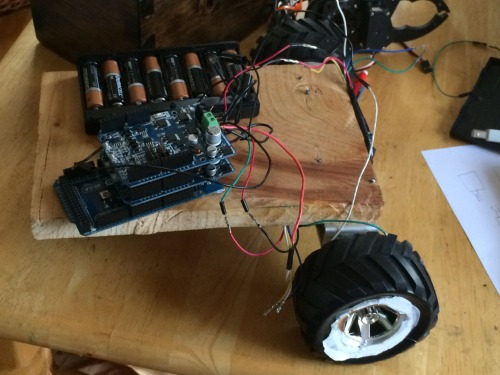
Just to let you know I have recently built a new chassis for my trinity firefighting robot. The purpose of me building a new chassis was that the old chassis was too diffucult to use and debug. FIrst of all it was a self ballancer robot which made it diffucult to control. Second of all it was so tiny it was diffucult to debug the wiring. Any opinions on the new chassis? Thank you.
From: Noah
PS: I used the same electronics from the old robot to the new robot including motors. Enjoy!!!

Hi Noah, This is looking
Hi Noah,
This is looking good. Interesting to see that you are using the full 12 volts. I am guessing this thing goes really fast. Does it have any special features such as following a preset course or obstacle avoidance? Have you made any videos of it moving?
Thank you so much!!!
Dear: Danphobic
No I do not have any videos of this moving. Although the motors move somewhat fast with a lot of torque the motor drivers aren’t working yet. For some reason I think I wired everything right and programmed everything right but the motors will either pulsate or not run consistently. I might start a forum if I can’t figure it out. It worked fine with the other chassis. Thanks though!!! I will get a video immediately when I get some progress.
From: Noah



