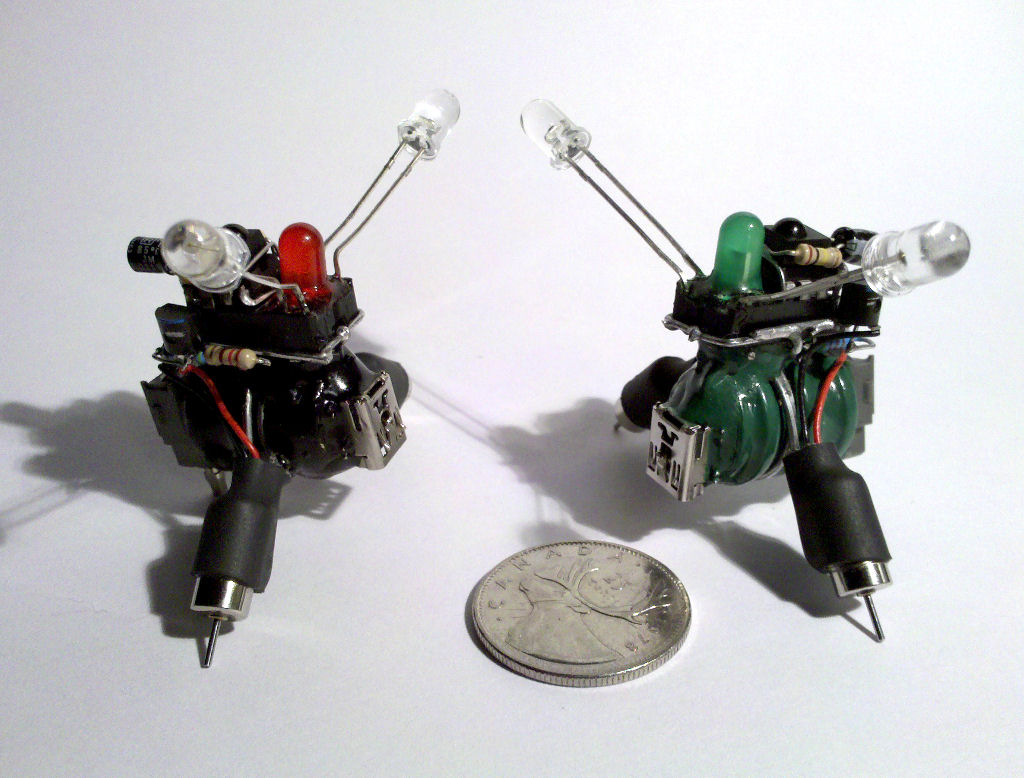
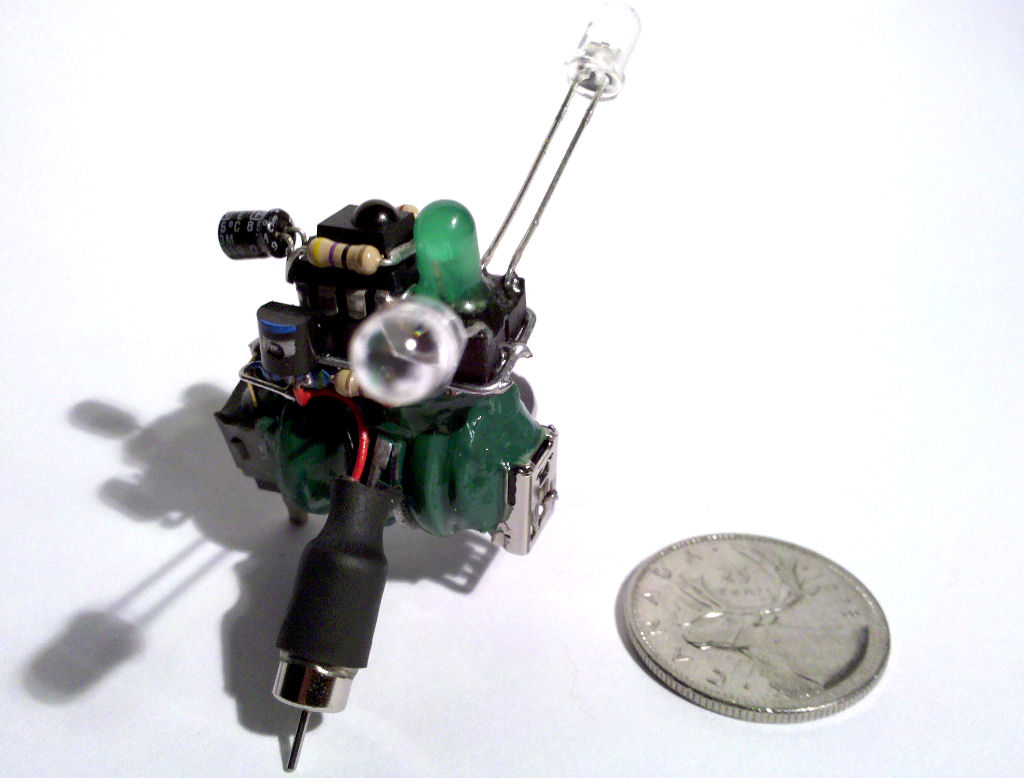
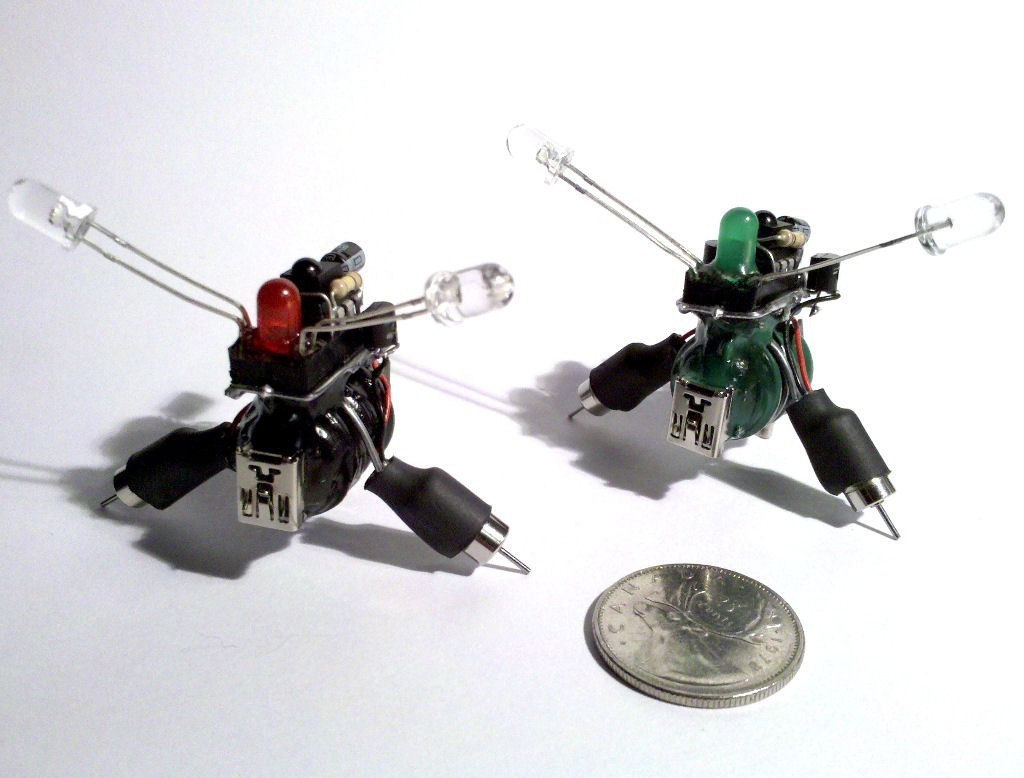
I am a robot with a microcontroller brain. I have been programmed to be remote controlled. I also have a Photovore Mode and a Photophobe Mode. I have a USB rechargeable battery.
I have been assembled from components intended for computers, cordless telephones, automobiles and cell phones. ________________________________________________________
Other Robot Projects in the Works. We welcome custom electronic & robotic requests.
I like the heat-shrink mounting for the motors and the 16 pin socket for wiring.
Looks to me like photodiodes/LEDs for light sensing, and a ir receiver on top of the MCU, so 2 ADC and a digital in. Two motors driven uni-directionally by transistors at the back, and an LED run with the last pin, so 3 out. 8 pin PIC, 3 in, 3 out, VCC and GND. With the AVR 8 pin I need to disable the reset pin (and therefore ISP) to match it. Very nice design, I especially like the remote control function.
On my next tiny bot I was going to try a tiny lipo and one of SparkFun’s new tiny chargers. My first attempt used CR2032s and had power problems. It looks like you are using some NiMH cells wired directly to a USB mini-B connector?
The Benefits of working with a blank PIC are that you have all the memory which the Picaxe compiler takes up, you have access to the registers and there are compilers for Basic, Assembly language and C.
The challenge is writing all routines from scratch.