

Ok, that is something what sits on my desk for a while and never got finished.
Inspired by Yahmez and his The MicRObot Challenge and also one of my Chinese friends little PVC robots I built this little light seeker. There is not much to tell anyway. My main purpose building it however was to see how small I can build with just a few basic parts and components as well using that motor/controller assembly which would be a waste to just keep it in a trash box.
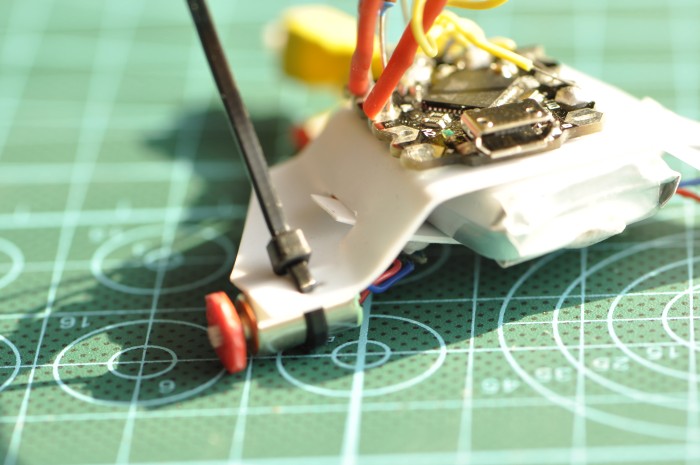
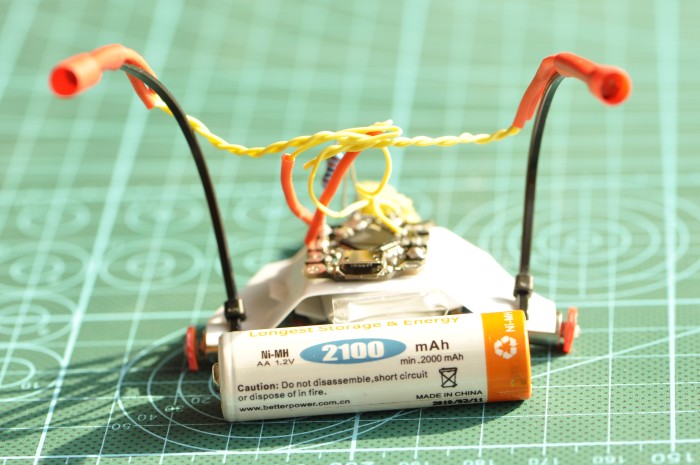
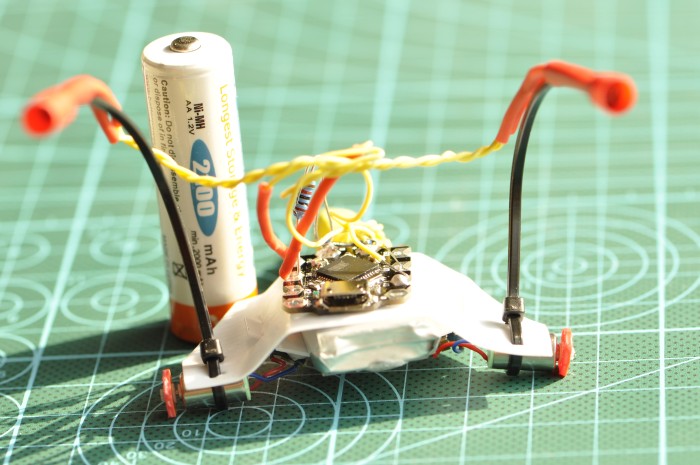
The body is made of ABS sheet and uses the battery as a main body mass :-)
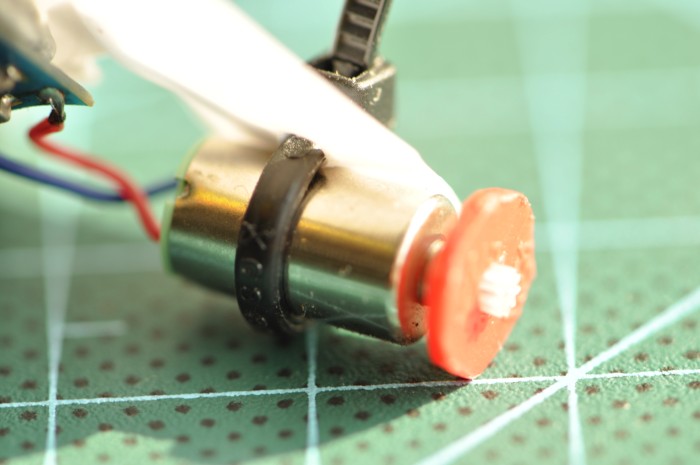
I had two 360° servos with broken gear and used those motors inclusive the controller board to dirve this little critter. It was a bit tweaking and try and error to get the right settings for speed vs torque. Because the motors has no gear I needed to slow them down to a reasonable speed.
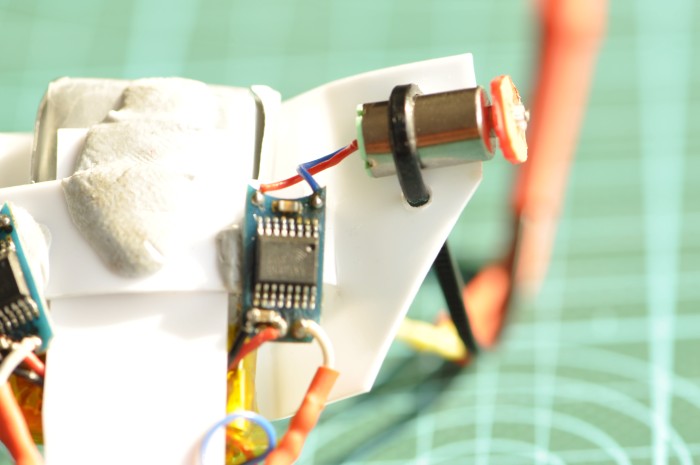
Also I used very tiny wheels, just a tiny bit bigger than the motors diameter. The wheels are cut from bottle caps and just stuck on the bevel pinion of the motor.
The motors are attached to the ABS body just with one cable tie which also serves as a sensor holder.
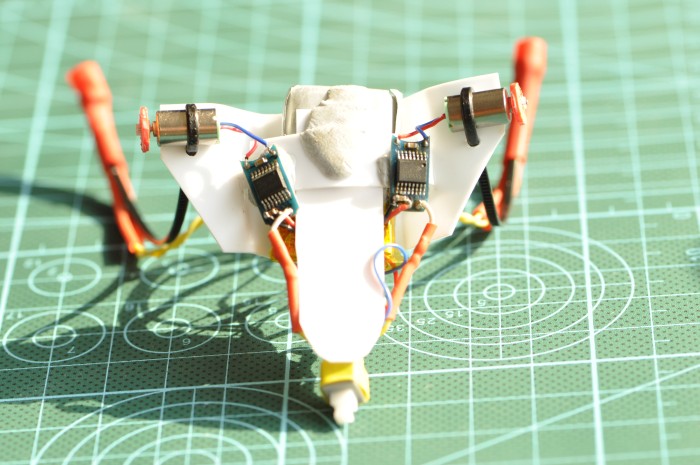
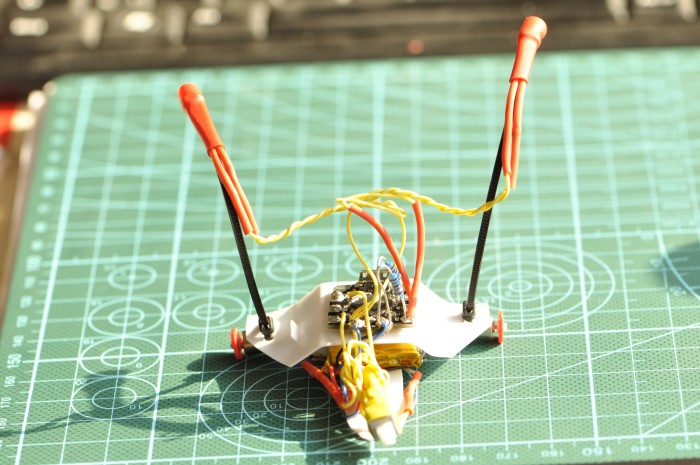
All connections from the sensors, motor controller boads, switch and battery to the Beetle are soldered directly on the Beetle. The Beetle is sticking on the ABS body with Blu Tack as well the sliding piece in the bottom of the battery is holding only with Blu Tack.
I did not bother sorting and strapping all the wires sice it will be disassembled later to build something else with the parts.
The next pictures shows the size of that little critter in relation to a standard AA battery.
The code is attached below. This time I tried some more commenting...hope that helps the newbies :-)
To use the code dirctly just rename the file to *.ino or copy paste it.
Oh yeah, the video will come tomorrow since it needs to be recorded and edited first is online now :-)
Goes to the brightest light source
- Actuators / output devices: 2x servo motors
- Control method: Full autonomous
- CPU: Atmega32u4
- Operating system: Arduino IDE
- Power source: 3.7V/550mAh LiPo
- Programming language: Arduino ide
- Sensors / input devices: 2x LDR
- Target environment: very flat and smooth surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/tiny-light-seeker-tls