For my dreamed symbiotic robots, I am looking for an alternative locomotion. For the passive robot (the trailer) anyway. The active tractor probably needs tracks. I heard Theo Jansen say on TED (improving on the wheel, 4 minutes into the video) that his design for a legged creature is (theoretically) more energy efficient than wheels or tracks. And equally sufficient in rough terrain. So I'll give it a try.
I discovered that some of the links in the parallellogram tend to bend and jump. Acting as springs. They could be tuned do do jumps, I reckon. Small ones at least.
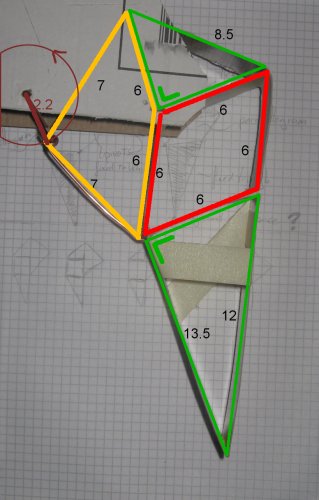
I spent quite some time finding the relative dimensions of these members which Jansen calls the 11 holy numbers. Maybe I am guilty of sacrilege? Anyway, some youtubers published detailed films, but still without actual numbers. So I kludged these together, guessing that symmetry would make for a good start.
Polymorph There’s your answer. I’ve used flattened sheets of polymorph as springs before. It works really well and I think it would be perfect for this project because you can make a lot of flat sheets, then just warm them up and press them together to form the part. NO GLUE!
FYI Jansen later realized that there are 12 holy numbers.
And of course there is.
The universe is made of 1, 2, 3, 4, 6, 12 acording to a theory that I have not yet published. But these are the magic / holy numbers for all things natural and complete; They make everything work.
I hate the 10-digit system, it is so ugly and irelevant.


 i have to
i have to