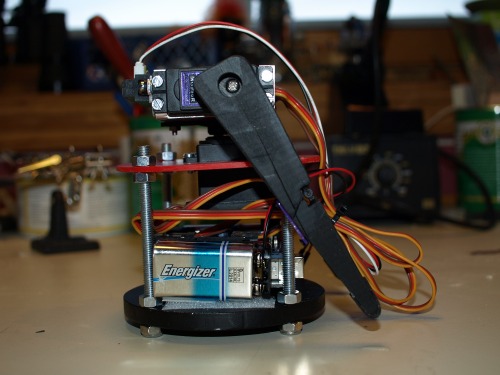
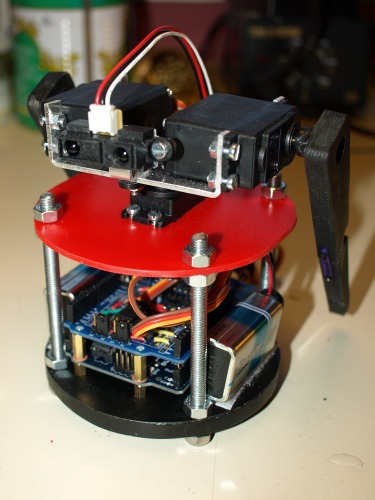
“The Crawler” is my first indoor robot with a range sensor.<o:p></o:p>
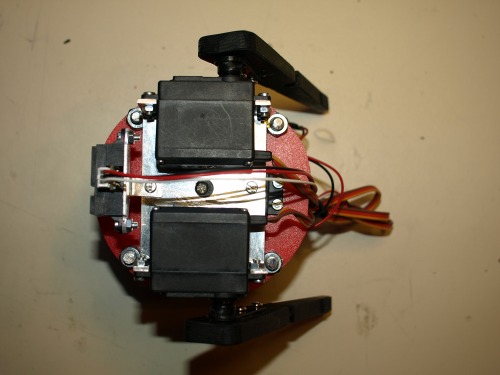
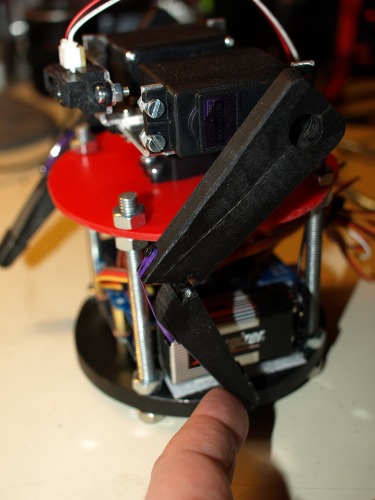
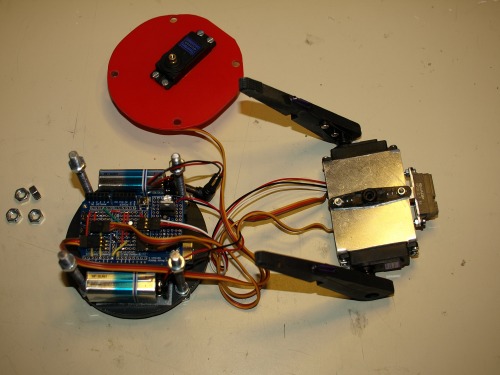
In hindsight I can see that I probably should have gone with motors and wheels, but I wanted to make it move with servos and not hack them for continuous rotation. The original plan was to use two extra servos for the elbows, but then the idea of using only a hinge and some form of spring came to me.
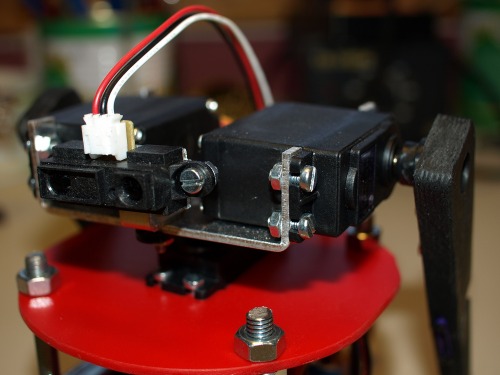
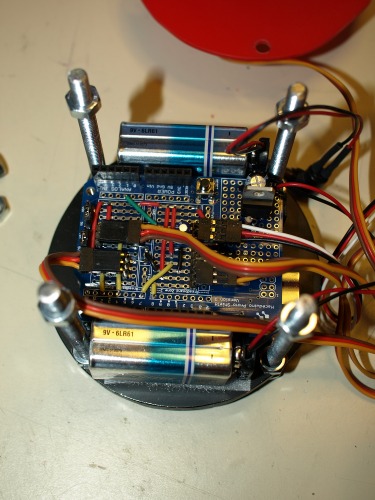
The base is an 8mm aluminum plate to give it some weight and stability. The Arduino is mounted on spacers on the base plate. An Arduino protoshield holds the voltage regulator for the servo power supply and headers for the servos and Sharp GP2D12 sensor.
Very cool first robot. I Very cool first robot. I wonder if you could make a 4 legged robot with those sort of legs. Hope it isnt scratching the floor :P.


 </o:p><o:p></o:p>
</o:p><o:p></o:p>