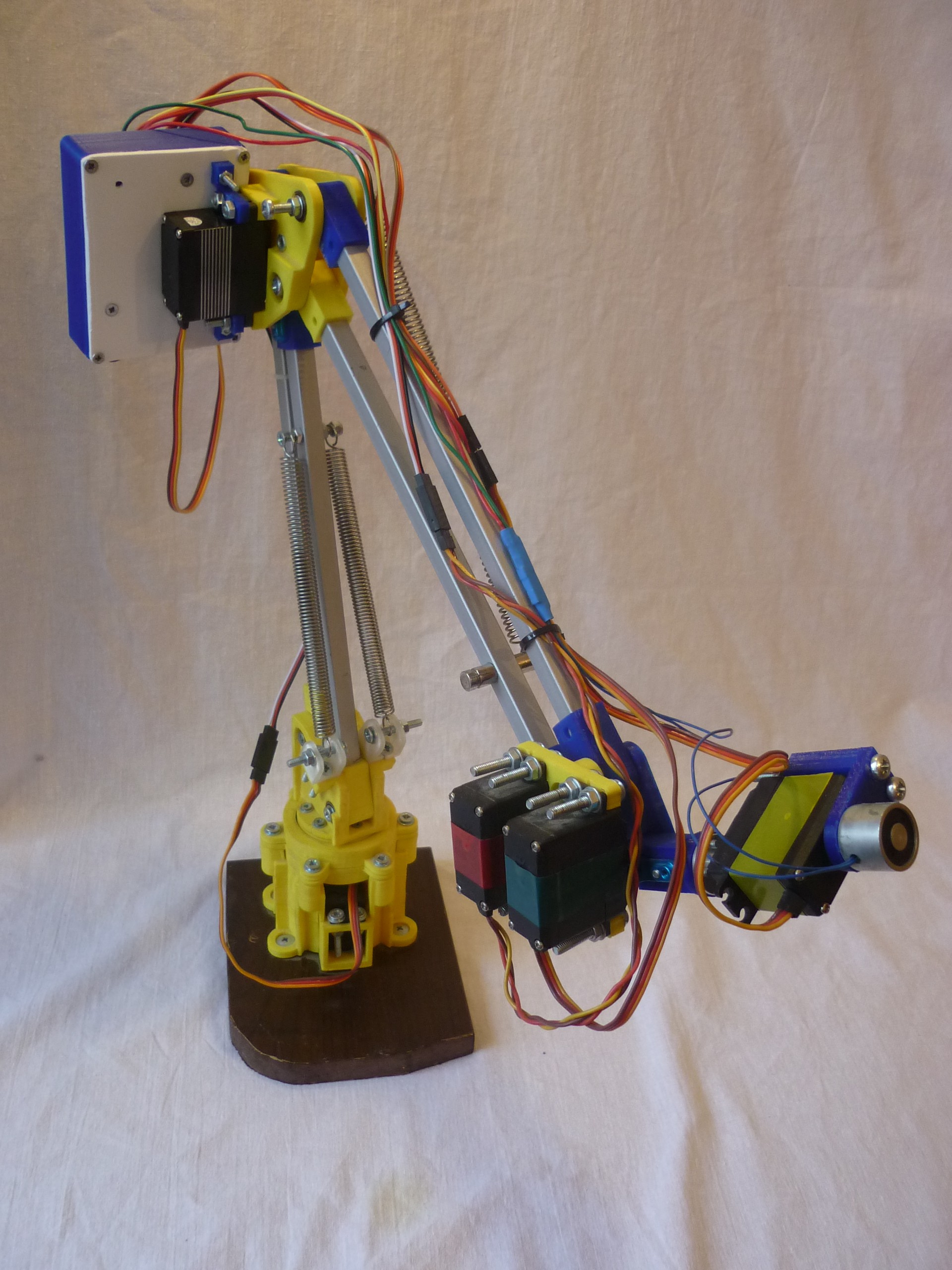
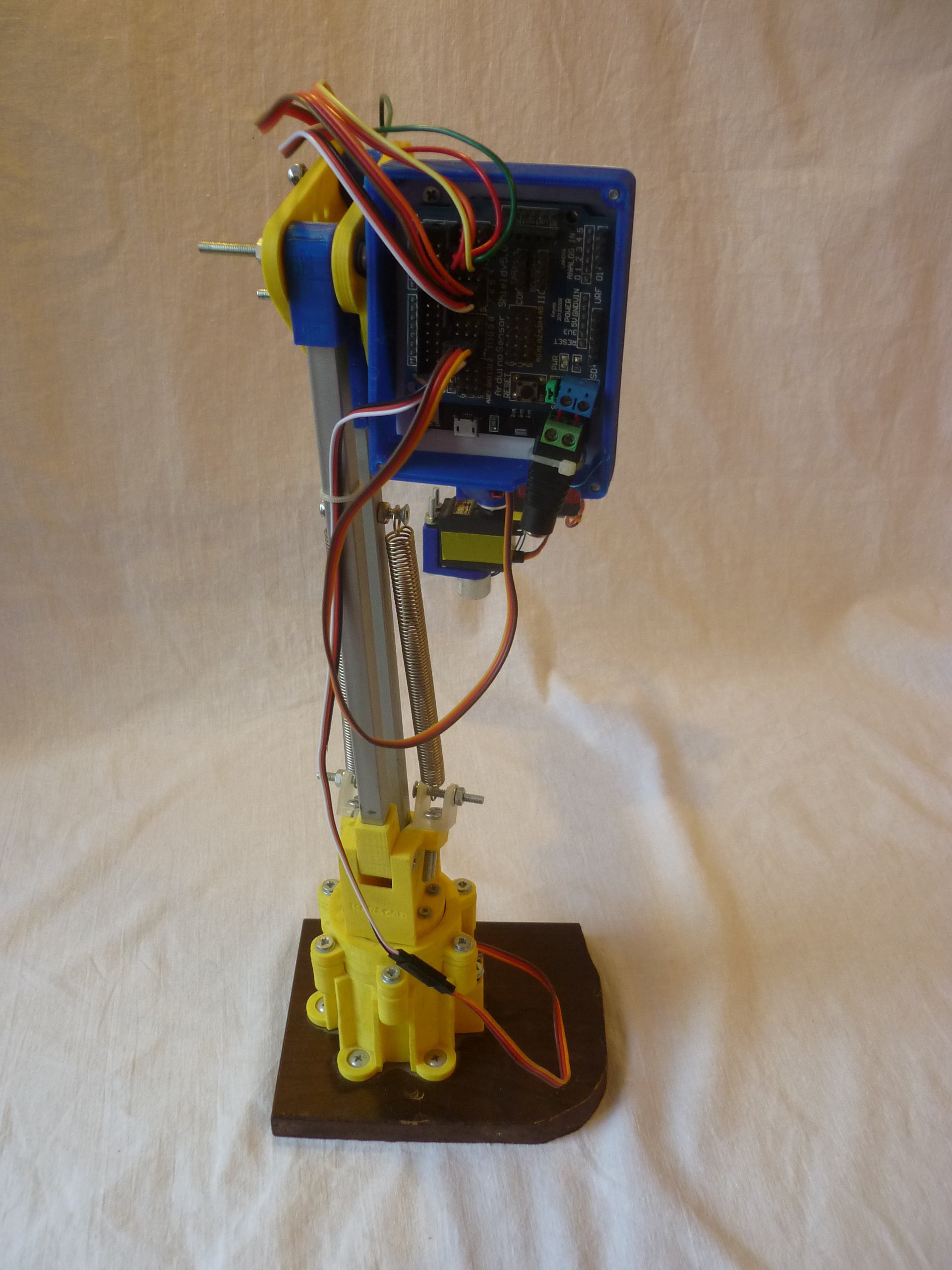
This is first version of my low cost 3d printed robot arm. It is based on Ikea Tertial lamp. I choose it because it has very good kinematic with using springs to unload servos. So you can use different number of springs to achive diffrent lifting power.
I recommend your to use VarSpeedServo library by NETLab Toolkit Group. It allows your to change speed of your servo. Your can read more and download it at GitHub.
I like the idea of re-using something around home to create a new robot with some servos and a micro. Great project! The VarSpeedServo is a great adition and I didn’t know about it. I’ll have a look Thanks for sharing and keep going!
Thank you! With standart servo library all motions were too fast and rude. So I decided to use VarSpeedServo library to make it nice and smooth. Also it allows to automatically wait until one move complet, before begining next.




 Thanks for sharing and keep going!
Thanks for sharing and keep going!