Since I started messing with robotics that I wanted to build a tank, and finally that moment arrived when two Tamiya thread kits and a Twin Motor Gearbox arrived.
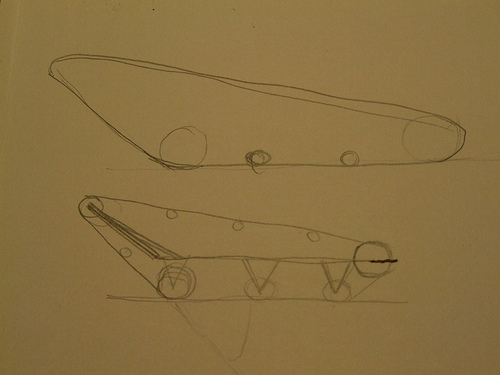
Everything started with a sketch:
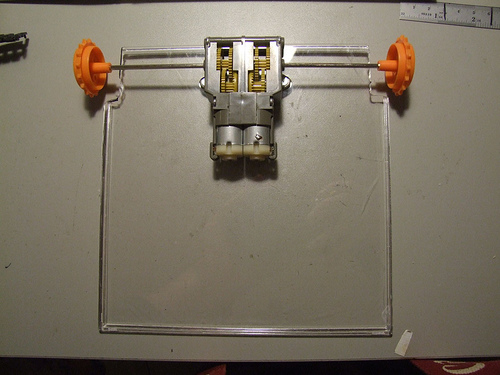
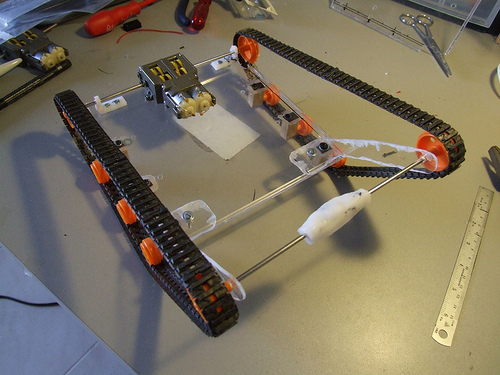
And as soon as I decided what I want, the assemble process has began. I have some plastic sheets laying around and I thought they would be perfect to hold all the hardware.
The chassis:
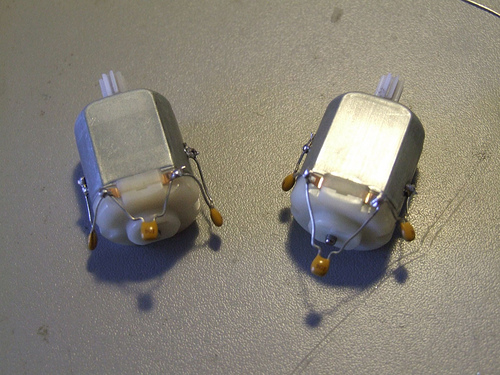
Meanwhile the replacement motors from Pololu arrived and I soldered the caps to remove motor noise. The ones that came with the twin gear box are very noisy (electrically speaking)
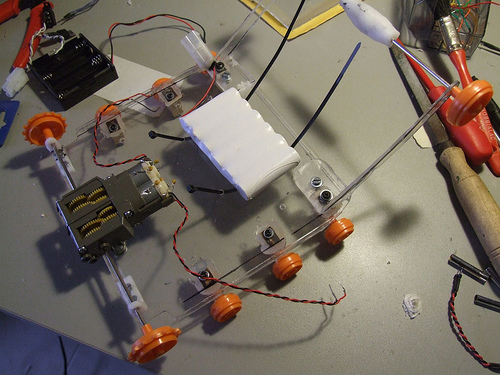
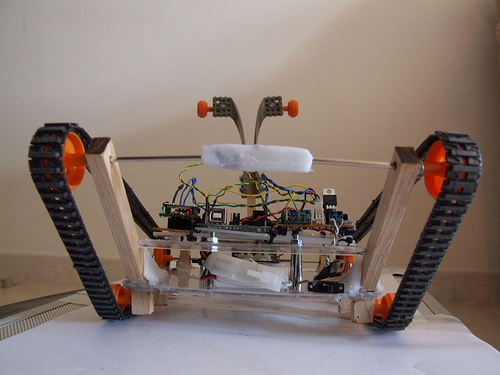
This is the design in an almost final phase:
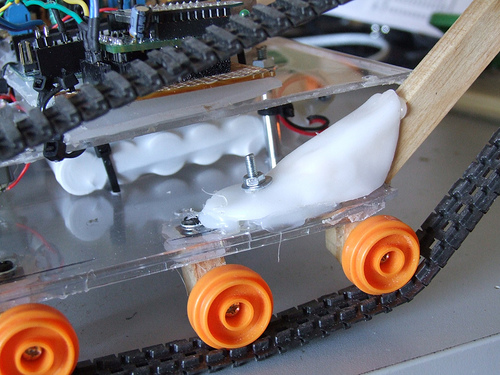
Later I replaced the plastic things for wood, and I used polymorph for the first time, it´s the best material I have seen in the last decades.
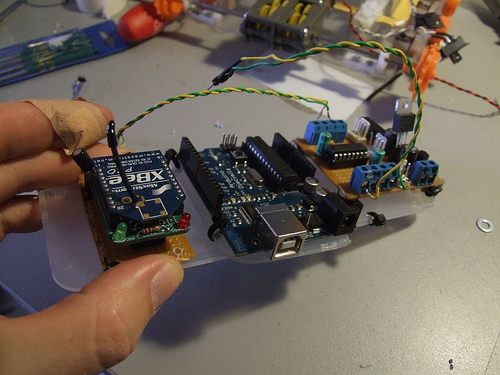
The brains (Xbee, Arduino and my custom motor driver with L293D):
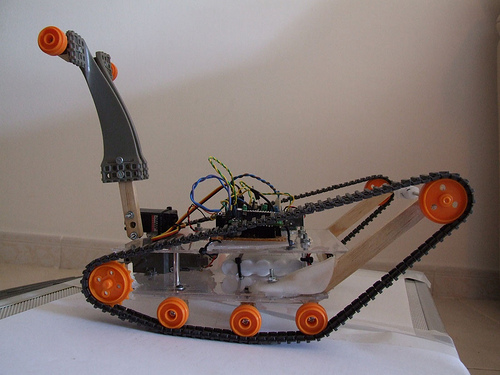
When all the things got in place it was time for a test drive through some obstacles.. I figured that it needs some kind of stabilizer.. otherwise it won´t climb more difficult obstacles, OR it may flip around… (I think i´m just having an idea for another bot)
and… this was what the solution I came up with :D
I placed an “arm” on the back, it stops the tank from flipping over when its climbing stuff.
Great, nice fat base there. Great, nice fat base there. Do you lower the arm on the back as a stabilizer to stop it flipping over when its climbing stuff?_
If you added more plastic If you added more plastic sheets to the underbelly that would help it from bottoming out. In effect it could act like a ramp and help propell the bot over the object. Very cool robot. Anything with tracks gets a coolness factor +1.
I don´t understand exactly I don´t understand exactly what you mean by adding more plasic sheets to the underbellt… but you will see the ‘performance’ of the arm, its really cool
Make it so that the bottom Make it so that the bottom is flat and smooth from where it angles to the bottom that is parallel to the floor. This way if you run over something it will push the robot up instead of running into the object and getting stuck. I could show what I mean a lot easier if I was decent at sketchup.
I though in something I though in something similar, but that could lead to another problem, it would increase the length of the robot and would be difficult to maneuver in short spaces… this is the same thing but it goes up when you don´t need it and low when you need … besides, its cool to see things movin…
update: now I REALLY understand what you mean and I haven’t thought on that…
The arm is cool. Maybe it is not a perfect solution, but it sure is unconventional. Which, in my book, means extra cool points.
I would really like to see this with autonomous control. How would a robot decide when to use this arm, when it did not have the operators eye and brain to guide it?
The movement of the arm is controlled by the operator?. Are you thinking in automatic operation?.
On the other hand I see a bunch of batteries in the photos: two packs of 5 and 6 units. How do you distribute the power to arduino, twin gearbox and servo?. Are 6V enough for the microcontroller?.
This rocks This is really awesome. I just ordered the Xbee’s the other day and they should be here tomorrow. Can’t wait to for us to experiment with them on our robot.
i´m using a 7.2V battery, i´m using a 7.2V battery, being regulated to 6V to power the motors, and then being regulated at 5V to power the Arduino and servo.