



Tankah
Since I started messing with robotics that I wanted to build a tank, and finally that moment arrived when two Tamiya thread kits and a Twin Motor Gearbox arrived.
Everything started with a sketch:
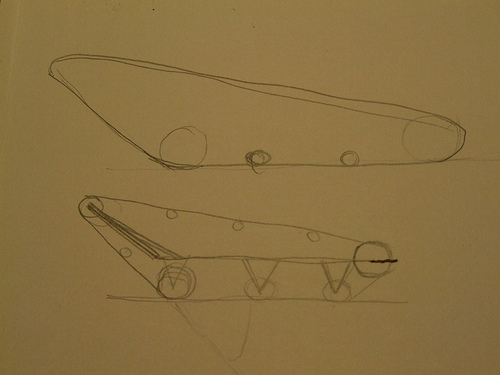
And as soon as I decided what I want, the assemble process has began.
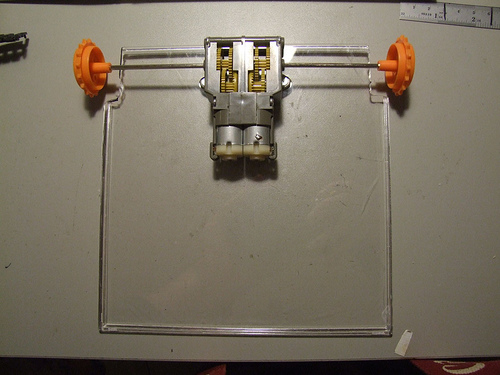
I have some plastic sheets laying around and I thought they would be perfect to hold all the hardware.
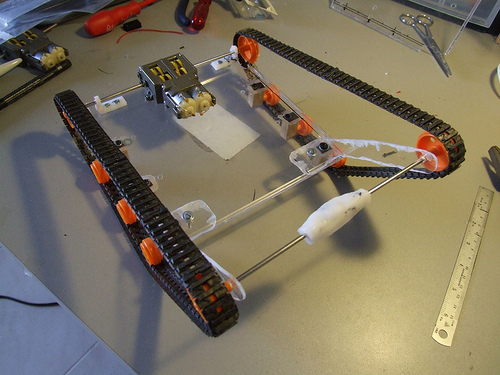
The chassis:
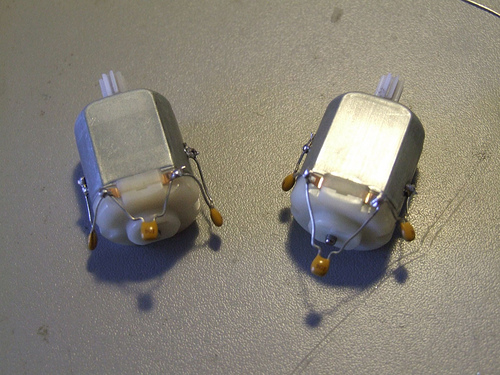
Meanwhile the replacement motors from Pololu arrived and I soldered the caps to remove motor noise.
The ones that came with the twin gear box are very noisy (electrically speaking)
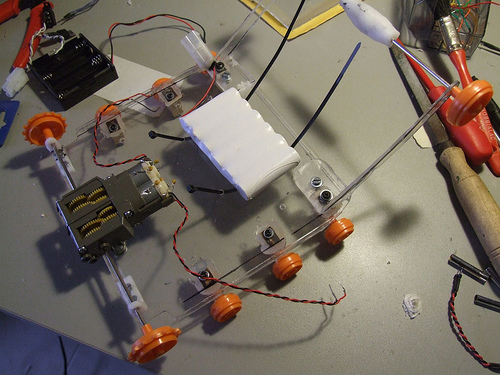
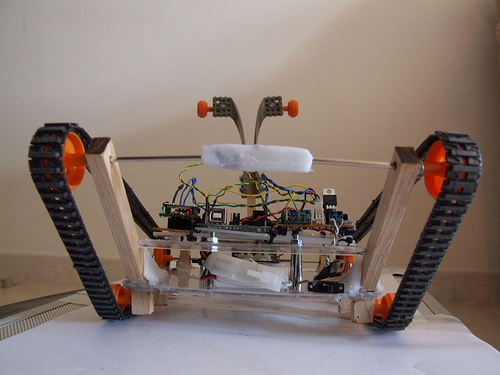
This is the design in an almost final phase:
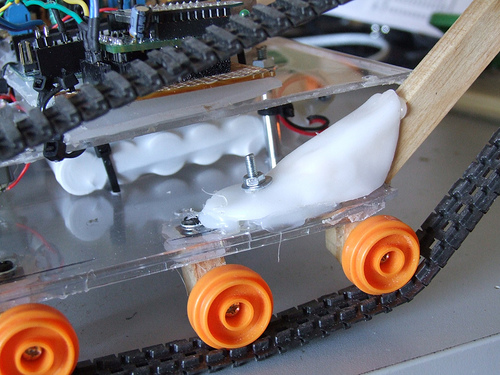
Later I replaced the plastic things for wood, and I used polymorph for the first time, it´s the best material I have seen in the last decades.
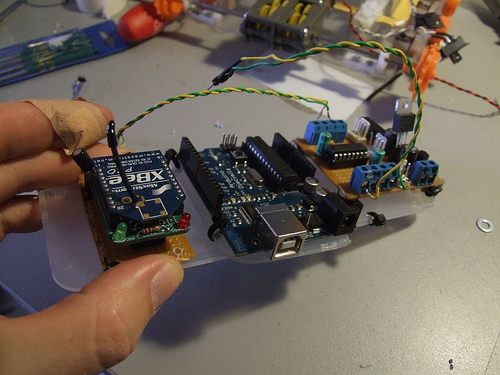
The brains (Xbee, Arduino and my custom motor driver with L293D):
When all the things got in place it was time for a test drive through some obstacles..
I figured that it needs some kind of stabilizer.. otherwise it won´t climb more difficult obstacles, OR it may flip around… (I think i´m just having an idea for another bot)

and… this was what the solution I came up with :D
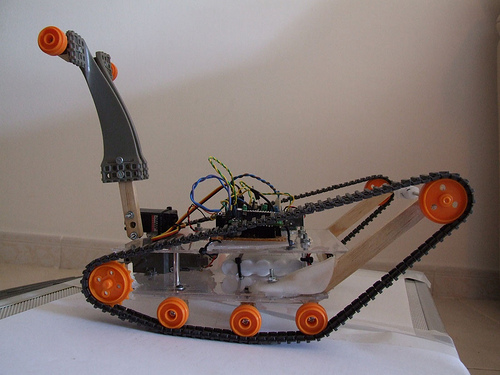
I placed an “arm” on the back, it stops the tank from flipping over when its climbing stuff.
It works like a charm :-)
It´s a lot of fun to drive this thing!! :-)remote control
- Actuators / output devices: Tamiya twin gearbox
- Control method: RF Remote Control
- CPU: Arduino
- Power source: 6V
- Programming language: Arduino C
- Target environment: indoor